Application of Deep Learning Convolution Neural Network Method on KRSBI Humanoid R-SCUAD Robot
DOI:
https://doi.org/10.12928/biste.v2i1.985Keywords:
Deep Learning, CNN, Robot Humanoid, Tensor FlowAbstract
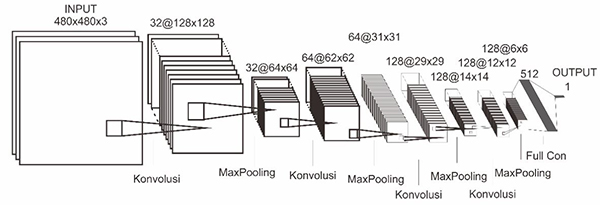
In a soccer game the ability of humanoid robots that one needs to have is to see the ball object in real time. Development of the ability of humanoid robots to see the ball has been developed but the level of accuracy of object recognition and adaptation during matches still needs to be improved. The architecture designed in this study is Convolutional Neural Network or CNN which is designed to have 6 hidden layers with implementation of the robot program using the Tensorflow library. The pictures taken are used in the training process to have 9 types of images based on where the pictures were taken. Each type of image is divided into 2 classes, namely 2000 images for ball object classes and 2000 images for non-ball object classes. The test is done in real time using a white ball on green grass. From the architectural design and white ball detection test results obtained a success rate of 67%, five of the nine models managed to recognize the ball. The model can recognize objects with an image processing speed of a maximum of 13 FPS.
Dalam pertandingan sepak bola kemampuan robot humanoid yang perlu dimiliki salah satunya adalah melihat objek bola secara real time. Pengembangan kemampuan robot humanoid untuk melihat bola telah dikembangkan tetapi tingkat akurasi pengenalan objek dan adaptasi saat pertandingan masih perlu ditingkatkan. Arsitektur yang dirancang pada penelitian ini yaitu Convolutional Neural Network atau CNN yang dirancang memiliki 6 hidden layer dengan implementasi pada program robot menggunakan library Tensorflow. Gambar yang diambil digunakan dalam proses training memiliki 9 jenis gambar berdasarkan tempat pengambilan gambar. Tiap jenis gambar terbagi menjadi 2 class yaitu 2000 gambar untuk class objek bola dan 2000 gambar untuk class objek bukan bola. Pengujian dilakukan secara real time dengan menggunakan bola berwarna putih di atas rumput hijau. Dari perancangan arsitektur dan hasil pengujian pendeteksian bola putih didapatkan persentase keberhasilan 67% yaitu lima dari sembilan model berhasil mengenali bola. Model dapat mengenali objek dengan kecepatan pengolahan gambar adalah maksimal 13 FPS.
References
T. M. Tsani, “Mesin Visi Pada Robot Sepak Bola R-SCUAD,” Ahmad Dahlan, 2015.
J. W. G. Putra, Pengenalan Konsep Pembelajaran Mesin dan Deep Learning, 1.1. 2018.
E. M. KUSUMANINGTYAS, Ed., “Bab 8 Jaringan Saraf Tiruan (Neural networks),” in PENS : Kecerdasan Buatan, 2011.
S. Yahya, “Fuzzy Logic, Neural Network, Genetic Algorithm Knowledge Based Expert System and Computational Intelligence,” 2012.
K. G. Kim, Book Review : Deep Learning. 2016.
“Convolutional Neural Networks,” Transactions of the Japanese Society for Artificial Intelligence, 2018. [Online]. Available: https://cs231n.github.io/convolutional-networks/.
Y. Lecun, L. Eon Bottou, Y. Bengio, and P. Haaner, “Gradient-Based Learning Applied to Document Recognition RS-SVM Reduced-set support vector method. SDNN Space displacement neural network. SVM Support vector method. TDNN Time delay neural network. V-SVM Virtual support vector method,” Proc. Ieee, no. November, pp. 1–46, 1998.
Y. Kim, “Convolutional Neural Networks for Sentence Classification,” Proc. 2014 Conf. Empir. Methods Nat. Lang. Process., pp. 1746–1751, 2014.
A. Karpathy and T. Leung, “Karpathy_Large-scale_Video_Classification_2014_CVPR_paper,” pp. 10–20, 2018.
R. D. Kusumanto, A. N. Tompunu, D. Wahyu, and S. Pambudi, “Klasifikasi Warna Menggunakan Pengolahan Model Warna HSV,” vol. 2, no. 2, pp. 83–87, 2011.
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You Only Look Once: Unified, Real-Time Object Detection,” 2015.
P. Taylor, I. Ha, Y. Tamura, and H. Asama, “Development of open platform humanoid robot,” vol. 27, no. February, pp. 37–41, 2013.
E. Rudiawan, R. Analia, D. S. P, and H. Soebakti, “The Deep learning Development for Real-Time Ball and Goal Detection of Barelang-FC,” no. October, pp. 146–151, 2017.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2020 Syahid Al Irfan

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

