Development of Design and Control Manipulator Arm on Hexapod Robot with Smart Vision Sensor
DOI:
https://doi.org/10.12928/biste.v5i3.8907Keywords:
Hexapods, Controllers, Manipulator, Robot, PixyAbstract
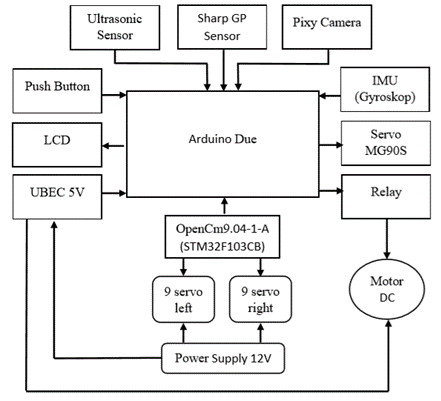
In 2021, the Indonesian Search and Rescue Robot Competition underwent significant changes, transitioning from its original name of "Firefighting Robot Contest" to "Search and Rescue Robot Contest." With existing regulations and new races, this robot used in the Indonesian Search and Rescue Robot Contest is an essential addition manipulator robot arm to finish mission victim rescue. With existing study about Design Development and Control Manipulator Arm on this Hexapod Robot with Smart Vision Sensor expected can help the development of the AL-JAZARI team's hexapod robot in mission victim rescue. Research, This does development design and control from a manipulator robot arm that can save victims in the rules of the Indonesian Search and Rescue Robot Contest. This uses input from the Pixy Camera, and its output is from the movement of the manipulator arm of the MG90S servo, which can save the orange victim. A Pixy Camera detects the victim and is picked up by a robotic arm. The manipulator's arm uses the MG90S servo as the actuator. In contrast, the buffer from the servo uses a 3D print designed to adapt to robotic bodies and efficiently, at times, save victims. Result study This robot can run on the victim rescue track by pushing the start button, then the robot will move autonomously with level success casualty rescue by 85% at good lighting and level lighting success dim by 80%.
References
S. Y. Misyurin, G. V. Kreinin, N. Y. Nosova, and A. P. Nelubin, "Six-legged walking robot (hexabot), kinematics, dynamics and motion optimization," Procedia Computer Science, vol. 190, pp 604-610, 2021, https://doi.org/10.1016/j.procs.2021.06.071.
N. Rymer, A. J. Moore and M. Schubert, "Inexpensive, Lightweight Method of Detecting Coronas with UAVs," 2018 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 452-457, 2018, https://doi.org/10.1109/ICUAS.2018.8453385.
M. Kanwar and L. Agilandeeswari, "IOT Based Fire Fighting Robot," 2018 7th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), pp. 718-723, 2018, https://doi.org/10.1109/ICRITO.2018.8748619.
A. Mohapatra and T. Trinh, "Early wildfire detection technologies in practice—a review," Sustainability, vol. 14, no. 19, p. 12270, 2022, https://doi.org/10.3390/su141912270.
C. Bal, "Neural coupled central pattern generator based smooth gait transition of a biomimetic hexapod robot," Neurocomputing, vol. 420, pp. 210-226, 2021, https://doi.org/10.1016/j.neucom.2020.07.114.
E. C. Orozco-Magdaleno, F. Gómez-Bravo, E. Castillo-Castañeda and G. Carbone, "Evaluation of Locomotion Performances for a Mecanum-Wheeled Hybrid Hexapod Robot," in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 3, pp. 1657-1667, 2021, https://doi.org/10.1109/TMECH.2020.3027259.
J. Fu et al., "Whole-body Spatial Teleoperation Control of a Hexapod Robot in Unstructured Environment," 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), pp. 93-98, 2021, https://doi.org/10.1109/ICARM52023.2021.9536197.
S. D. Perkasa, P. Megantoro, and H. A. Winarno, "Implementation of a camera sensor pixy 2 CMUcam5 to a two wheeled robot to follow colored object. Journal of Robotics and Control (JRC), vol. 2, no. 6, pp. 469-501, 2021, https://doi.org/10.18196/26128.
A. I. N. Alshbatat, S. Alhameli, S. Almazrouei, S. Alhameli and W. Almarar, "Automated Vision-based Surveillance System to Detect Drowning Incidents in Swimming Pools," 2020 Advances in Science and Engineering Technology International Conferences (ASET), pp. 1-5, 2020, https://doi.org/10.1109/ASET48392.2020.9118248.
M. F. Aqillah, R. Mardiati and A. E. Setiawan, "Prototype of Robot Movement Navigation System Using Pixy Camera (CMUCAM 5)," 2022 8th International Conference on Wireless and Telematics (ICWT), pp. 1-6, 2022, https://doi.org/10.1109/ICWT55831.2022.9935409.
M. Kholil, Ismanto, I. Athaillah, H. P. Waspada, R. Akhsani and M. S. Muluk, "Detecting Egg’s Condition by Using Pixy Camera Based on Shell-Color Filtering," 2023 International Seminar on Intelligent Technology and Its Applications (ISITIA), pp. 83-86, 2023, https://doi.org/10.1109/ISITIA59021.2023.10220989.
E. A. Z. Hamidi, M. R. Effendi and F. F. Asmoro, "Design and Implementation of Model Autonomous Sentry Gun Using Image Processing and Motion Tracking," 2019 IEEE 5th International Conference on Wireless and Telematics (ICWT), pp. 1-5, 2019, https://doi.org/10.1109/ICWT47785.2019.8978245.
M. F. Ahmad, S. S. N. Alhady, W. Rahiman, W. A. F. W. Othman, and A. A. M. Zahir, "Visual based distance recognition technique by using pixy CMUcam5," In Intelligent Manufacturing & Mechatronics: Proceedings of Symposium, 29 January 2018, Pekan, Pahang, Malaysia, pp. 479-485, 2018, https://doi.org/10.1007/978-981-10-8788-2_43.
M. Filipenko and I. Afanasyev, "Comparison of Various SLAM Systems for Mobile Robot in an Indoor Environment," 2018 International Conference on Intelligent Systems (IS), pp. 400-407, 2018, https://doi.org/10.1109/IS.2018.8710464.
S. F. M. Putri, R. Mardiati and A. E. Setiawan, "The Prototype of Arm Robot for Object Mover Using Arduino Mega 2560," 2022 8th International Conference on Wireless and Telematics (ICWT), pp. 1-6, 2022, https://doi.org/10.1109/ICWT55831.2022.9935416.
I. Tursynbek and A. Shintemirov, "Modeling and Simulation of Spherical Parallel Manipulators in CoppeliaSim (V-REP) Robot Simulator Software," 2020 International Conference Nonlinearity, Information and Robotics (NIR), pp. 1-6, 2020, https://doi.org/10.1109/NIR50484.2020.9290227.
N. Kandalaft, P. S. Kalidindi, S. Narra and H. N. Saha, "Robotic arm using voice and Gesture recognition," 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), pp. 1060-1064, 2018, https://doi.org/10.1109/IEMCON.2018.8615055.
L. -B. Chen, X. -R. Huang, W. -H. Chen, W. -Y. Pai, G. -Z. Huang and W. -C. Wang, "Design and Implementation of an Artificial Intelligence of Things-Based Autonomous Mobile Robot System for Cleaning Garbage," in IEEE Sensors Journal, vol. 23, no. 8, pp. 8909-8922, 2023, https://doi.org/10.1109/JSEN.2023.3254902.
A. Tai, M. Chun, Y. Gan, M. Selamet, and H. Lipson, “PARA: A one-meter reach, two-kg payload, three-DoF open source robotic arm with customizable end effector,” HardwareX, vol. 10, p. e00209, 2021, https://doi.org/10.1016/j.ohx.2021.e00209.
M. H. Memon, M. Hammad Memon, A. kumar, S. M. Marium and J. Khan, "Prototype of Smart Trainable Robotic Arm," 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), pp. 1-5, 2019, https://doi.org/10.1109/I2CT45611.2019.9033778.
I. Liashenko, A. Ramon, A. Cabot, and J. Rosell-Llompart, "Ultrafast electrohydrodynamic 3D printing with in situ jet speed monitoring. Materials & Design, vol. 206, p. 109791, 2021, https://doi.org/10.1016/j.matdes.2021.109791.
S. Sharma, S. Sahai, J. Joshi and N. Hema, "Stage-wise Development of a Remote Controlled Robotic Arm," 2018 Fifth International Conference on Parallel, Distributed and Grid Computing (PDGC), pp. 364-367, 2018, https://doi.org/10.1109/PDGC.2018.8745871.
K. M. Hasib, M. A. Rahman, M. Tahsin, A. Karim, S. Azam and F. DeBoer, "LFR Waiter: Arduino Based Android Application Controlled Waiter Robot," TENCON 2022 - 2022 IEEE Region 10 Conference (TENCON), pp. 1-6, 2020, https://doi.org/10.1109/TENCON55691.2022.9977936.
S. Li, R. Rameshwar, A. M. Votta and C. D. Onal, "Intuitive Control of a Robotic Arm and Hand System With Pneumatic Haptic Feedback," in IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4424-4430, 2019, https://doi.org/10.1109/LRA.2019.2937483.
P. Melin, C. Baier, E. Espinosa, J. Riedemann, J. Espinoza, and R. Pena, “Study of the Open-Source Arduino DUE Board as Digital Control Platform for Three-Phase Power Converters,” IEEE Access, vol. 10, pp. 7574–7587, 2022, https://doi.org/10.1109/ACCESS.2021.3138705.
Y. Siregar, S. D. Novalina and K. Erman, "Design of Detectors on Automatic Trolley Using Ultrasonic Distance Sensors at Airports," 2021 IEEE 5th International Conference on Information Technology, Information Systems and Electrical Engineering (ICITISEE), pp. 349-353, 2021, https://doi.org/10.1109/ICITISEE53823.2021.9655821.
A. Mustafa, A. Omer and O. Mohammed, "Intelligent Glasses for Visually Impaired People," 2022 14th International Conference on Computational Intelligence and Communication Networks (CICN), pp. 29-33, 2022, https://doi.org/10.1109/CICN56167.2022.10008291.
S. Chakraborty, S. Mukherjee, T. Nag, B. Biswas, B. Garang and A. Nayak, "A low cost autonomous multipurpose vehicle for advanced robotics," 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), pp. 1067-1078, 2018, https://doi.org/10.1109/UEMCON.2018.8796543.
L. P. Rondon, L. Babun, A. Aris, K. Akkaya, and A. S. Uluagac, "Survey on enterprise Internet-of-Things systems (E-IoT): A security perspective," Ad Hoc Networks, vol. 125, p. 102728, 2022, https://doi.org/10.1016/j.adhoc.2021.102728.
A. Alotaibi, "Automated and intelligent system for monitoring swimming pool safety based on the IoT and transfer learning," Electronics, vol. 9, no. 12, p. 2082, 2020, https://doi.org/10.3390/electronics9122082.
A. M. Shehata, E. M. Mohamed, K. L. Salem, A. M. Mohamed, M. A. Salam and M. M. Gamil, "A Survey of Drowning Detection Techniques," 2021 International Mobile, Intelligent, and Ubiquitous Computing Conference (MIUCC), pp. 286-290, 2021, https://doi.org/10.1109/MIUCC52538.2021.9447677.
I. W. S. Nirawana, K. Y. E. Aryanto and G. Indrawan, "Mobile Robot Based Autonomous Selection of Fuzzy-PID Behavior and Visual Odometry for Navigation and Avoiding Barriers in the Plant Environment," 2018 International Conference on Computer Engineering, Network and Intelligent Multimedia (CENIM), pp. 234-239, 2018, https://doi.org/10.1109/CENIM.2018.8710911.
A. K. Singh, R. K. Mandal, V. Raj and P. Gauri, "Design of Autonomous Electric Vehicle Detecting the Roadside Buildings," 2020 IEEE First International Conference on Smart Technologies for Power, Energy and Control (STPEC), pp. 1-6, 2020, https://doi.org/10.1109/STPEC49749.2020.9297793.
M. Abdullah-Al-Noman, A. N. Eva, T. B. Yeahyea, and R. Khan, “Computer Vision-based Robotic Arm for Object Color, Shape, and Size Detection,” J. Robot. Control, vol. 3, no. 2, pp. 180–186, 2022, https://doi.org/10.18196/jrc.v3i2.13906.
J. -H. Li, Y. -S. Ho and J. -J. Huang, "Line Tracking with Pixy Cameras on a Wheeled Robot Prototype," 2018 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), pp. 1-2, 2018, https://doi.org/10.1109/ICCE-China.2018.8448948.
M. Skoczeń, M. Ochman, K. Spyra, M. Nikodem, D. Krata, M. Panek, and A. Pawłowski, "Obstacle detection system for agricultural mobile robot application using RGB-D cameras," Sensors, vol. 21, no. 16, p. 5292, 2021, https://doi.org/10.3390/s21165292.
Y. Ren, Y. Liu, S. Ji, A. K. Sangaiah, and J. Wang, "Incentive mechanism of data storage based on blockchain for wireless sensor networks," Mobile Information Systems, vol. 2018, 2018, https://doi.org/10.1155/2018/6874158.
A. Nagpal and G. Gabrani, "Python for Data Analytics, Scientific and Technical Applications," 2019 Amity International Conference on Artificial Intelligence (AICAI), pp. 140-145, 2019, https://doi.org/10.1109/AICAI.2019.8701341.
P. P. Reboucas Filho, S. P. P. da Silva, V. N. Praxedes, J. Hemanth, and V. H. C. de Albuquerque, "Control of singularity trajectory tracking for robotic manipulator by genetic algorithms," Journal of computational science, vol. 30, pp. 55-64, 2019, https://doi.org/10.1016/j.jocs.2018.11.006.
I. Al-Darraji, D. Piromalis, A. A. Kakei, F. Q. Khan, M. Stojmenovic, G. Tsaramirsis, and P. G. Papageorgas, "Adaptive robust controller design-based RBF neural network for aerial robot arm model," Electronics, vol. 10, no. 7, p. 831, 2021, https://doi.org/10.3390/electronics10070831.
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Gralo Yopa Rahmat Pratama, Nuryono Satya Widodo

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

