Optimizing UAV Navigation: A Particle Swarm Optimization Approach for Path Planning in 3D Environments
DOI:
https://doi.org/10.12928/biste.v5i4.9696Keywords:
UAV , Navigation , PSO , Dynamic Path Planning , 3D , PythonAbstract
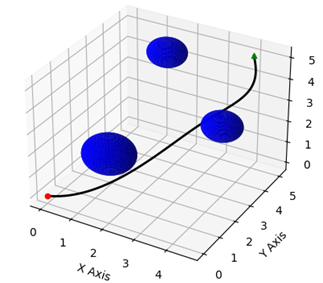
This study explores the application of Particle Swarm Optimization (PSO) in Unmanned Aerial Vehicle (UAV) path planning within a simulated three-dimensional environment. UAVs, increasingly prevalent across various sectors, demand efficient navigation solutions that account for dynamic and unpredictable elements. Traditional pathfinding algorithms often fall short in complex scenarios, hence the shift towards PSO, a bio-inspired algorithm recognized for its adaptability and robustness. We developed a Python-based framework to simulate the UAV path planning scenario. The PSO algorithm was tasked to navigate a UAV from a starting point to a predetermined destination while avoiding spherical obstacles. The environment was set within a 3D grid with a series of waypoints, marking the UAV's trajectory, generated by the PSO to ensure obstacle avoidance and path optimization. The PSO parameters were meticulously tuned to balance the exploration and exploitation of the search space, with an emphasis on computational efficiency. A cost function penalizing proximity to obstacles guided the PSO in real-time decision-making, resulting in a collision-free and optimized path. The UAV's trajectory was visualized in both 2D and 3D perspectives, with the analysis focusing on the path's smoothness, length, and adherence to spatial constraints. The results affirm the PSO's effectiveness in UAV path planning, successfully avoiding obstacles and minimizing path length. The findings highlight PSO's potential for practical UAV applications, emphasizing the importance of parameter optimization. This research contributes to the advancement of autonomous UAV navigation, indicating PSO as a viable solution for real-world path planning challenges.
References
M. T. R. Khan, M. Muhammad Saad, Y. Ru, J. Seo, and D. Kim, “Aspects of unmanned aerial vehicles path planning: Overview and applications,” Int. J. Commun. Syst., vol. 34, no. 10, pp. 1–18, 2021, https://doi.org/10.1002/dac.4827.
A. Utsav, A. Abhishek, P. Suraj, and R. K. Badhai, “An IoT based UAV network for military applications,” in 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), pp. 122–125, 2021, https://doi.org/10.1109/WiSPNET51692.2021.9419470.
Y. Li, M. Liu, and D. Jiang, “Application of unmanned aerial vehicles in logistics: a literature review,” Sustainability, vol. 14, no. 21, p. 14473, 2022, https://doi.org/10.3390/su142114473.
J H. M. Ray, R. Singer and N. Ahmed, "A Review of the Operational Use of UAS in Public Safety Emergency Incidents," 2022 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 922-931, 2022, https://doi.org/10.1109/ICUAS54217.2022.9836061.
D. C. Tsouros, S. Bibi, and P. G. Sarigiannidis, “A review on UAV-based applications for precision agriculture,” Information, vol. 10, no. 11, p. 349, 2019, https://doi.org/10.3390/info10110349.
N. Delavarpour, C. Koparan, J. Nowatzki, S. Bajwa, and X. Sun, “A technical study on UAV characteristics for precision agriculture applications and associated practical challenges,” Remote Sens., vol. 13, no. 6, p. 1204, 2021.
S. Manfreda et al., “On the use of unmanned aerial systems for environmental monitoring,” Remote Sensing, vol. 10, no. 4, p. 641, 2018, https://doi.org/10.3390/rs10040641.
A. Fascista, “Toward integrated large-scale environmental monitoring using WSN/UAV/Crowdsensing: A review of applications, signal processing, and future perspectives,” Sensors, vol. 22, no. 5, p. 1824, 2022, https://doi.org/10.3390/s22051824.
M. Jones, S. Djahel, and K. Welsh, “Path-planning for unmanned aerial vehicles with environment complexity considerations: A survey,” ACM Comput. Surv., vol. 55, no. 11, pp. 1–39, 2023, https://doi.org/10.1145/3570723.
C. Wang, J. Wang, Y. Shen, and X. Zhang, “Autonomous navigation of UAVs in large-scale complex environments: A deep reinforcement learning approach,” IEEE Trans. Veh. Technol., vol. 68, no. 3, pp. 2124–2136, 2019, https://doi.org/10.1109/TVT.2018.2890773.
F. Causa, G. Fasano, and M. Grassi, “Multi-UAV path planning for autonomous missions in mixed GNSS coverage scenarios,” Sensors, vol. 18, no. 12, p. 4188, 2018, https://doi.org/10.3390/s18124188.
S. Aggarwal and N. Kumar, “Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges,” Comput. Commun., vol. 149, pp. 270–299, 2020, https://doi.org/10.1016/j.comcom.2019.10.014.
A. Sonny, S. R. Yeduri and L. R. Cenkeramaddi, "Autonomous UAV Path Planning Using Modified PSO for UAV-Assisted Wireless Networks," in IEEE Access, vol. 11, pp. 70353-70367, 2023, https://doi.org/10.1109/ACCESS.2023.3293203.
B. Song, Z. Wang, and L. Zou, “An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve,” Appl. Soft Comput., vol. 100, p. 106960, 2021, https://doi.org/10.1016/j.asoc.2020.106960.
A. Puente-Castro, D. Rivero, A. Pazos, and E. Fernandez-Blanco, “A review of artificial intelligence applied to path planning in UAV swarms,” Neural Comput. Appl., pp. 1–18, 2022, https://doi.org/10.1007/s00521-021-06569-4.
E. Dhulkefl, A. Durdu, and H. Terziouglu, “Dijkstra algorithm using UAV path planning,” Konya J. Eng. Sci., vol. 8, pp. 92–105, 2020, https://doi.org/10.36306/konjes.822225.
J. Guo, W. Xia, X. Hu, and H. Ma, “Feedback RRT* algorithm for UAV path planning in a hostile environment,” Comput. & Ind. Eng., vol. 174, p. 108771, 2022, https://doi.org/10.1016/j.cie.2022.108771.
M. T. R. Khan, M. Muhammad Saad, Y. Ru, J. Seo, and D. Kim, “Aspects of unmanned aerial vehicles path planning: Overview and applications,” Int. J. Commun. Syst., vol. 34, no. 10, p. e4827, 2021, https://doi.org/10.1002/dac.4827.
J. Carvajal-Rodriguez, M. Morales, and C. Tipantuña, “3D Path Planning Algorithms in UAV-Enabled Communications Systems: A Mapping Study,” Futur. Internet, vol. 15, no. 9, p. 289, 2023, https://doi.org/10.3390/fi15090289.
J. Zirong, Z. Liang and Z. Zhilong, "3D Trajectory Planning of UAV Based on DPGA," in IEEE Access, vol. 9, pp. 105667-105677, 2021, https://doi.org/10.1109/ACCESS.2021.3099836.
X. Lin, C. Wang, K. Wang, M. Li, and X. Yu, “Trajectory planning for unmanned aerial vehicles in complicated urban environments: A control network approach,” Transp. Res. Part C Emerg. Technol., vol. 128, p. 103120, 2021, https://doi.org/10.1016/j.trc.2021.103120.
C. Miao, G. Chen, C. Yan, and Y. Wu, “Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm,” Comput. & Ind. Eng., vol. 156, p. 107230, 2021, https://doi.org/10.1016/j.cie.2021.107230.
F. H. Ajeil, I. K. Ibraheem, A. T. Azar, and A. J. Humaidi, “Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments,” Sensors, vol. 20, no. 7, p. 1880, 2020, https://doi.org/10.3390/s20071880.
L. Liu, X. Wang, X. Yang, H. Liu, J. Li, and P. Wang, “Path planning techniques for mobile robots: Review and prospect,” Expert Syst. Appl., p. 120254, 2023, https://doi.org/10.1016/j.eswa.2023.120254.
A. Fitriansyah, N. W. Parwati, D. R. Wardhani, and N. Kustian, “Dijkstra’s algorithm to find shortest path of tourist destination in Bali,” in Journal of Physics: Conference Series, vol. 1338, no. 1, p. 12044, 2019, https://doi.org/10.1088/1742-6596/1338/1/012044.
Z. Husain, A. Al Zaabi, H. Hildmann, F. Saffre, D. Ruta, and A. F. Isakovic, “Search and rescue in a maze-like environment with ant and dijkstra algorithms,” Drones, vol. 6, no. 10, p. 273, 2022, https://doi.org/10.3390/drones6100273.
S. Sundarraj, R. V. K. Reddy, M. B. Basam, G. H. Lokesh, F. Flammini and R. Natarajan, "Route Planning for an Autonomous Robotic Vehicle Employing a Weight-Controlled Particle Swarm-Optimized Dijkstra Algorithm," in IEEE Access, vol. 11, pp. 92433-92442, 2023, https://doi.org/10.1109/ACCESS.2023.3302698.
L. Yang et al., “Path Planning Technique for Mobile Robots: A Review,” Machines, vol. 11, no. 10, p. 980, 2023, https://doi.org/10.3390/machines11100980.
S. Solmaz, R. Muminovic, A. Civgin, and G. Stettinger, “Development, Analysis, and Real-life Benchmarking of RRT-based Path Planning Algorithms for Automated Valet Parking,” in 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), pp. 621–628, 2021, https://doi.org/10.1109/ITSC48978.2021.9564413.
P. Zhao et al., “Dynamic RRT: Fast Feasible Path Planning in Randomly Distributed Obstacle Environments,” J. Intell. & Robot. Syst., vol. 107, no. 4, p. 48, 2023, https://doi.org/10.1007/s10846-023-01823-4.
M. D. Phung and Q. P. Ha, “Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization,” Appl. Soft Comput., vol. 107, p. 107376, 2021, https://doi.org/10.1016/j.asoc.2021.107376.
P. B. Fernandes, R. C. L. Oliveira, and J. V. F. Neto, “Trajectory planning of autonomous mobile robots applying a particle swarm optimization algorithm with peaks of diversity,” Appl. Soft Comput., vol. 116, p. 108108, 2022, https://doi.org/10.1016/j.asoc.2021.108108.
A. A. Alsakati, C. A. Vaithilingam, J. Alnasseir, K. Naidu, and G. Rajendran, “Transient stability enhancement of grid integrated wind energy using particle swarm optimization based multi-band PSS4C,” IEEE Access, vol. 10, pp. 20860–20874, 2022, https://doi.org/10.1109/ACCESS.2022.3151425.
F. H. Ajeil, I. K. Ibraheem, M. A. Sahib, and A. J. Humaidi, “Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm,” Appl. Soft Comput., vol. 89, p. 106076, 2020, https://doi.org/10.1016/j.asoc.2020.106076.
B. Tang, K. Xiang, M. Pang, and Z. Zhanxia, “Multi-robot path planning using an improved self-adaptive particle swarm optimization,” Int. J. Adv. Robot. Syst., vol. 17, no. 5, p. 1729881420936154, 2020, https://doi.org/10.1177/1729881420936154.
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Gregorius Airlangga

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

