Motion-Making Messenger Robot 1 at the ABU Indonesia Robot Contest 2019 Using the Odometry Method
DOI:
https://doi.org/10.12928/biste.v4i3.6191Keywords:
Robot, Odometry, Rotary, Encoder, Motor DC, PIDAbstract
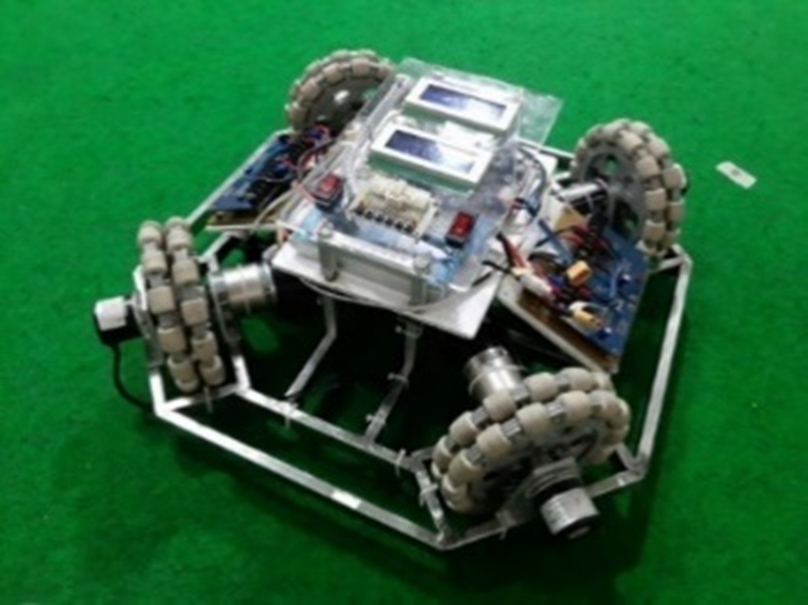
This research discusses the development of robot messenger 1 movement at the ABU Indonesia 2019 robot contest using odometry. To navigate at the time of the group, the Messenger Robot 1 robot is still operated manually. The disadvantage of manual operation of the robot is that the navigation of the robot is very dependent on the operation of the operator so that the robot is not accurate. Then a system is needed for navigation so that the robot can move accurately. Using the odometry method, it can estimate the change in position relative to the starting position. The positioning of the robot uses a rotary encoder to adjust the speed of the DC motor, according to the specified setpoint and determine the direction of motion of the robot. The test results of the odometry method using rotary encoder sesnor on simple motion, namely forward motion obtained an average error at the X coordinate point of -0.58 cm and at the Y coordinate of -3.02 cm, while in reverse motion obtained an average error, namely at the X coordinate point of 0.39 cm and at the Y coordinate of 3.03 cm. Based on these results it can be concluded that the robot can move literally with a fairly good level of accuracy.
References
R. Hartono, T. N. Nizar, I. Robani, and D. A. Jatmiko, "Motion and Navigation Control System of a Mobile Robot as A Prototype of An Autonomous Vehicle," In IOP Conference Series: Materials Science and Engineering, vol. 879, no. 1, p. 012100, 2020, https://doi.org/10.1088/1757-899X/879/1/012100.
A. Sofwan, H. R. Mulyana, H. Afrisal, and A. Goni, "Development of Omni-Wheeled Mobile Robot Based-on Inverse Kinematics and Odometry," 2019 6th International Conference on Information Technology, Computer and Electrical Engineering (ICITACEE), pp. 1-6, 2019, https://doi.org/10.1109/ICITACEE.2019.8904418.
G. Popović et al., "Human localization in robotized warehouses based on stereo odometry and ground-marker fusion," Robotics and Computer-Integrated Manufacturing, vol. 73, p. 102241, 2022, https://doi.org/10.1016/j.rcim.2021.102241.
X. Xiao et al., "Portable Body-Attached Positioning Mechanism Toward Robotic Needle Intervention," in IEEE/ASME Transactions on Mechatronics, vol. 25, no. 2, pp. 1105-1116, 2020, https://doi.org/10.1109/TMECH.2020.2974760.
X. Jordens, R. Wilmart, E. Garone, M. Kinnaert, and L. Catoire, "A Project-Based Learning Approach for Building an Affordable Control Teaching Lab: The Centrifugal Ring Positioner," in IEEE Access, vol. 10, pp. 4907-4918, 2022, https://doi.org/10.1109/ACCESS.2022.3141588.
J. Palacín and D. Martínez, "Improving the Angular Velocity Measured with a Low-Cost Magnetic Rotary Encoder Attached to a Brushed DC Motor by Compensating Magnet and Hall-Effect Sensor Misalignments," Sensors, vol. 21, no. 14, p. 4763, 2021, https://doi.org/10.3390/s21144763.
F. Gao, H. Li, J. Fei, C. Lu, S. Guo, and J. Zhang, "Remote-control Real-time Video Interactive Robot," 2021 3rd International Academic Exchange Conference on Science and Technology Innovation (IAECST), pp. 40-43, 2021, https://doi.org/10.1109/IAECST54258.2021.9695720.
K. Holdcroft, A. Bolotnikova, C. Belke, and J. Paik, "Modular robot networking: a novel schema and its performance assessment," 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 12698-12705, 2022, https://doi.org/10.1109/IROS47612.2022.9981688.
D. Nemec, J. Andel, V. Simak, and R. Pirnik, "Safety Aspects of the Wheeled Mobile Robot," 2022 ELEKTRO (ELEKTRO), pp. 1-6, 2022, https://doi.org/10.1109/ELEKTRO53996.2022.9803409.
H. Wang, N. Chen, D. Yang, and G. Fan, "Autonomous Navigation System for Indoor Mobile Robots Based on a Multi-sensor Fusion Technology," In CCF Conference on Computer Supported Cooperative Work and Social Computing, pp. 502-517, 2022, https://doi.org/10.1007/978-981-19-4546-5_39.
P. I. -T. Chang, C. -C. Liu, S. -C. F. Chiang, and C. -Y. Lan, "Signal-based and Model-based Wheel Fault Detection of Omni-directional Vehicle with Mecanum Wheel," 2020 International Automatic Control Conference (CACS), pp. 1-6, 2020, https://doi.org/10.1109/CACS50047.2020.9289703.
T. A. Mai, T. S. Dang, D. N. Anisimov, and E. Fedorova, "Fuzzy-PID Controller for Two Wheels Balancing Robot Based on STM32 Microcontroller," 2019 International Conference on Engineering Technologies and Computer Science (EnT), pp. 20-24, 2019, https://doi.org/10.1109/EnT.2019.00009.
Y. Xia, Q. Li, R. Huang, and X. Zhao, "Design of Intelligent Medical Service Robot based on Raspberry Pi and STM32," 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), pp. 1577-1581, 2022, https://doi.org/10.1109/ITAIC54216.2022.9836515.
J. Wang, M. Li, W. Jiang, Y. Huang, and R. Lin, "A Design of FPGA-Based Neural Network PID Controller for Motion Control System," Sensors, vol. 22, no. 3, p. 889, 2022, https://doi.org/10.3390/s22030889.
L. Li, H. Hu, Y. Qin, and K. Tang, "Digital approach to rotational speed measurement using an electrostatic sensor," Sensors, vol. 19, no. 11, p. 2540, 2019, https://doi.org/10.3390/s19112540.
C. Zhao and Z. Hua, "Design of Motor Speed Control System Based on STM32 Microcontroller," 2022 International Conference on Computation, Big-Data and Engineering (ICCBE), pp. 274-276, 2022, https://doi.org/10.1109/ICCBE56101.2022.9888225.
A. Badimon et al., "Negative feedback control of neuronal activity by microglia," Nature, vol. 586, no. 7829, pp. 417-423, 2020, https://doi.org/10.1038/s41586-020-2777-8.
A. Latif, K. Shankar, and P. T. Nguyen, "Legged fire fighter robot movement using PID," Journal of Robotics and Control (JRC), vol. 1, no. 1, pp. 15-19, 2020, https://doi.org/10.18196/jrc.1104.
D. Babunski, J. Berisha, E. Zaev, and X. Bajrami, "Application of Fuzzy Logic and PID Controller for Mobile Robot Navigation," 2020 9th Mediterranean Conference on Embedded Computing (MECO), pp. 1-4, 2020, https://doi.org/10.1109/MECO49872.2020.9134317.
D. U. Rijalusalam and I. Iswanto, "Implementation kinematics modeling and odometry of four omni wheel mobile robot on the trajectory planning and motion control based microcontroller," Journal of Robotics and Control (JRC), vol. 2, no. 5, pp. 448-455, 2021, https://doi.org/10.18196/jrc.25121.
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Dody Kurniawan, Wahyu Sapto Aji

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

