Design of Blessing Ball Throwing Techniques for KRAI 2018 Robot
DOI:
https://doi.org/10.12928/biste.v2i3.2623Keywords:
Robot Abu Robocon, Pneumatik, Arduino, Sudut Kemiringan, Pelempar Bola BerkahAbstract
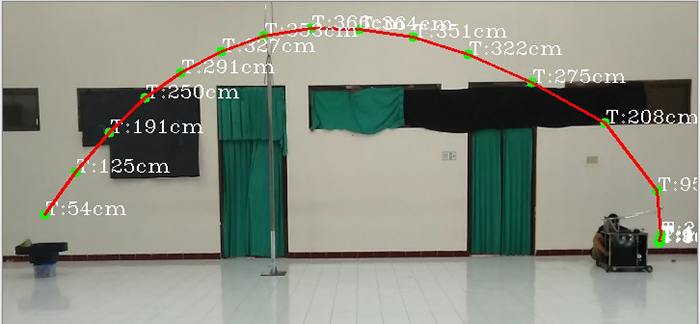
Abu Robocon 2018 which was held in Vietnam with the theme "nem con" which means throwing a berkah ball. The Indonesia Abu Robot Contest 2018 made a throwing robot design with different pole height. The parameter that must be achieved is the optimization of the throwing mechanical drive. The thrower mechanics in the KRAI robot can use pneumatically by determining the angle of the robotic thrower. The mechanical tilt angle determines the throwing distance of the berkah ball. To find out the height of this research berkah ball will use python to display the parabolic motion. Based on the results of the study obtained the first test results with a throwing angle of 0 ˚-115 ˚ get an average value of a distance of 7.37 m, height 273.4 Cm, time 1.42 s and speed of 5.152 m / s. The results of the two test with a throwing angle of 0 ˚-95˚ obtained an average distance of 8.78 m, height 352.4 Cm, time 1.63 s and speed 5.381 m / s. It can be concluded that the mechanical tilt angle is leaned forward, the pitching results will be lower. When the angle of inclination is tilted backwards the berkah ball will soar more.
References
Agustiawan, “Algoritma Robot Otomatis Pelempar Suttlecock,” Jurnal Inovtek POLBENG, Vol. 3, No. 1, Juni 2018. DOI: 10.35314/isi.v3i1.338
M. Kamaludin and W. S. Aji, “Manuver Robot Manual Menggunakan Pengendali PID pada Robot Manual KRAI 2018,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 1, no. 3, pp. 91-99, Desember 2019. DOI: 10.12928/biste.v1i3.978
A. Febriawan and W. S. Aji, “Rotating Control on Robots Indonesian Abu Robot Contest with PID and IMUBN005,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 2, no. 1, pp. 14-23, April 2019. DOI: 10.12928/biste.v1i3.987
A. R. Septiadi and S. Amri, “Rancang Bangun dan Analisa Robot Tematik Simulasi Pertanian dengan Kendali Wirelless,” Jurnal Infomedia Teknik Informatika, Multimedia dan Jaringan, vol. 4, no. 1, pp. 15-20, Juni 2019. DOI: 10.30811/jim.v4i1.916
Kanyuma Jitjumnong, Pasapitch Chujai, and Noritsugu Kamata, “Robot Contest for Innovative Development in Education Technology,” International Journal of Mechanical Engineering and Robotics Research, vol. 9, no. 3, pp. 395-400, Maret 2020. Online
B. Arifin, “Analisis Gerak Track Start untuk Memaksimalkan Jarak Lompatan Start pada Renang Ditinjau dari Kajian Biomekanika,” Jurnal Kesehatan Olahraga, vol. 2, no. 1, Januari 2014. Online
D. N. Afifah, D. Yulianawati, N. Agustina, R.D.S. Lestari, and M.G. Nugraha, “Metode Sederhana Menentukan Percepatan Gravitasi Bumi Menggunakan Aplikasi Tracker Pada Gerak Parabola Sebagai Media dalam Pembelajaran Fisika Sma,” Simposium Nasional Inovasi dan Pembelajaran Sains (SNIP), pp.305-308, Juni 2015. Online
W. Suwito, M. Rif’an, and P. Siwindarto, Pengaturan Posisi Piston Silinder Pneumatik pada Lengan Robot KRAI, 2014, Jurnal Mahasiswa Teknik Elektro Universitas Brawijaya, Vol. 2, No. 1, 2014. Online
I. W. Sutaya, G. S. Santyadiputra, and I. W. Sutaya, “Design of Hexapod Robot Movement Based on Arduino Mega 2560,” J. Phys.: Conf. Ser. 1165 012011, 2019. DOI: 10.1088/1742-6596/1165/1/012011
F. S. Rozak and R. Riandini, "Rancang bangun Lengan Robot Pelontar Bola dengan Sistem Pneumatik" ELECTRICES, Vol. 1, No.1, pp. 37-42, Oktober 2019. DOI: 10.32722/ees.v1i1.2305
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2020 Rochmat Diantoro, Wahyu Sapto Aji

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

