PID Control Based DC Boost Converter on Wheeled Soccer Robot
DOI:
https://doi.org/10.12928/biste.v3i2.3942Keywords:
DC-DC Converter, Boost Converter, Arduino Nano, PWM, Pulse width modulation, PIDAbstract
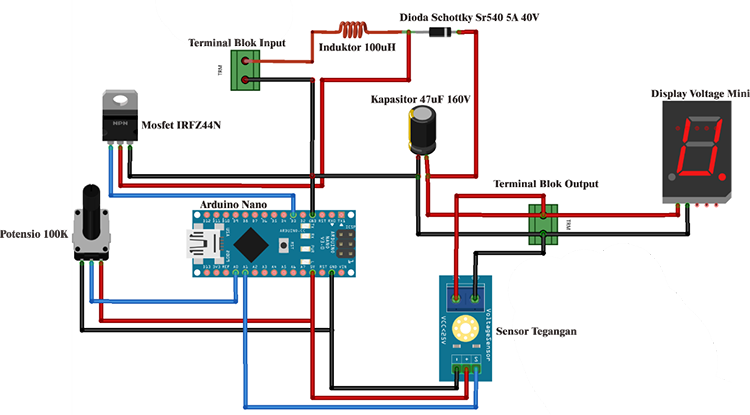
In this research, Proportional Integral Derivative (PID) controller is applied to the DC-DC Boost Converter system. The system is a power electronics circuit that functions to stabilize the voltage by increasing the value of the output voltage so that it is of a higher value than the input voltage without having to eliminate the relatively large power so that it can overcome the voltage shortage. Control is done by providing a signal or voltage that regulates the ON time and the OFF time of the switch. The voltage value is based on the duty cycle value which is a unit of PWM (Pulse Width Modulation). The input voltage at the boost converter tends to fluctuate and is unstable. On this basis, the output voltage must be controlled by a voltage converter that can be adjusted as desired to match a predetermined setpoint value. By setting the PWM value with the PID method, it is easier to get a constant output voltage value on the boost converter. The results obtained after using a PID control produce a very stable and constant output voltage without any ripple voltage. For the tuning parameter value used to produce a stable output voltage, the proportional value is 5, the integral value is 5, and the derivative value is 3.
Pada penelitian ini diterapkan pengendali Proporsional Integral Derivatif (PID) pada sistem DC-DC Boost Converter. Sistem tersebut merupakan suatu rangkaian elektronika daya yang berfungsi untuk menstabilkan tegangan dengan menaikkan nilai tegangan keluaran sehingga bernilai lebih tinggi dari tegangan masukkan tanpa harus menghilangkan daya yang relatif besar sehingga dapat mengatasi kekurangan tegangan. Pengendalian dilakukan dengan memberikan sinyal atau tegangan yang mengatur waktu ON dan waktu OFF switch. Nilai tegangan berdasarkan nilai duty cycle yang merupakan satuan dari PWM (Pulse Width Modulation). Tegangan masukkan pada boost converter cenderung fluktuatif dan tidak stabil. Atas dasar itu tegangan keluaran harus dikendalikan oleh sebuah konverter tegangan yang dapat diatur sesuai keinginan agar cocok dengan nilai set point yang telah ditetapkan. Dengan mengatur nilai PWM dengan metode PID dapat mempermudah untuk mendapatkan nilai tegangan keluaran yang konstan pada boost converter. Hasil penelitian yang didapatkan setelah menggunakan sebuah kendali PID ini menghasilkan tegangan keluaran yang sangat stabil dan konstan tanpa adanya tegangan ripple. Untuk nilai tuning parameter yang digunakan sehingga menghasilkan tegangan keluaran yang stabil yaitu nilai proporsional adalah 5, nilai integral adalah 5, dan nilai derivatif adalah 3.
References
I. Irkham, I. Setiawan, and A. Nugroho, “Perancangan Boost Converter Sebagai Suplai Inverter Menggunakan Dspic30F4011 Dengan Metode Kontrol Proportional Integral,” Transient, vol. 7, no. 3, p. 737, 2019. https://doi.org/10.14710/transient.7.3.737-744
M. Jamlay and W. M. Faizal, “Dual feedback control dc-dc boost converter menggunakan pi controller,” Inovtek, vol. 4, pp. 91–97, 2014. http://ejournal.polbeng.ac.id/index.php/IP/article/view/103
M. Paul Jeyaraj, M. Senthil Kumar, T. Arun Prasath, S. Muthulakshmi, and S. Aiswariya, “Power factor correction and THD minimization in boost converter with PID controller,” Materials Today: Proceedings, 2021. https://doi.org/10.1016/j.matpr.2021.03.327
R. Lendyarto, T. Sukmadi, and J. Windarta, “Pengaruh pengaturan boost converter terhadap torsi dan kecepatan motor induksi tiga fase rotor belitan,” Transient: Jurnal Ilmiah Teknik Elektro, vol. 6, no. 4, pp. 657-664, Dec. 2017. https://ejournal3.undip.ac.id/index.php/transient/article/view/18797
M. M. Anzehaee, B. Behnam, and P. Hajihosseini, “Augmenting ARMarkov-PFC predictive controller with PID-Type III to improve boost converter operation,” Control Engineering Practice, vol. 79, pp. 65–77, 2018. https://doi.org/10.1016/j.conengprac.2018.07.006
M. A. Mazta, A. S. Samosir, and A. Haris, “Rancang Bangun Interleaved Boost Converter Berbasis Arduino,” J. Rekayasa dan Teknol. Elektro, vol. 10, no. 1, pp. 22–29, 2016. https://electrician.unila.ac.id/index.php/ojs/article/view/190
R. Setiawan and M. Yuhendri, “Implementasi DC-DC Boost Converter Menggunakan Arduino Berbasis Simulink Matlab,” JTEIN, vol. 1, no. 2, pp. 144–149, 2020. https://doi.org/10.24036/jtein.v1i2.64
M. A. Assyidiq, B. Winardi, and T. Andromeda, “Perancangan Boost Converter Menggunakan Voltage Feedback Pada Panel Surya,” Transient, vol. 6, no. 3, p. 404, 2017. https://doi.org/10.14710/transient.6.3.404-410
Z. Jamal, “Implementasi Kendali Pid Penalaan Ziegler-Nichols Menggunakan Mikrokontroler,” J. Inform., vol. 15, no. 1, pp. 81–88, 2015. https://jurnal.darmajaya.ac.id/index.php/JurnalInformatika/article/view/410
Yuzhu Cheng, Yong Chen and Hongxing Wang, "Design of PID controller based on information collecting robot in agricultural fields," 2011 International Conference on Computer Science and Service System (CSSS), 2011, pp. 345-348. https://doi.org/10.1109/CSSS.2011.5974664
S. Ekinci and B. Hekimoglu, “Improved Kidney-Inspired Algorithm Approach for Tuning of PID Controller in AVR System,” IEEE Access, vol. 7, pp. 39935–39947, 2019. https://doi.org/10.1109/ACCESS.2019.2906980
Q. H. Seer and J. Nandong, “Stabilization and PID tuning algorithms for second-order unstable processes with time-delays,” ISA Trans., vol. 67, pp. 233–245, 2017. https://doi.org/10.1016/j.isatra.2017.01.017
O. Ibrahim, N. Z. Yahaya, and N. Saad, “Comparative studies of PID controller tuning methods on a DC-DC boost converter,” Int. Conf. Intell. Adv. Syst. ICIAS 2016, pp. 1–5, 2017. https://doi.org/10.1109/ICIAS.2016.7824044
A. S. Bazanella, L. F. A. Pereira, and A. Parraga, “A new method for PID tuning including plants without ultimate frequency,” IEEE Trans. Control Syst. Technol., vol. 25, no. 2, pp. 637–644, 2017. https://doi.org/10.1109/TCST.2016.2557723
A. Hamed, E. M. Shaban, R. R. Darwish, and A. M. Abdel ghany, “Design and implementation of discrete PID control applied to Bitumen tank based on new approach of pole placement technique,” Int. J. Dyn. Control, vol. 5, no. 3, pp. 604–613, 2017. https://doi.org/10.1007/s40435-015-0199-5
H. S. Purnama, T. Sutikno, N. S. Widodo, and S. Alavandar, “Efficient PID Controller based Hexapod Wall Following Robot,” 2019 6th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), 2019, pp. 91-94. https://doi.org/10.23919/EECSI48112.2019.8976964
S. H. Chincholkar, W. Jiang, and C. Y. Chan, “An Improved PWM-Based Sliding-Mode Controller for a DC-DC Cascade Boost Converter,” IEEE Trans. Circuits Syst. II Express Briefs, vol. 65, no. 11, pp. 1639–1643, 2018. https://doi.org/10.1109/TCSII.2017.2754292
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2021 Kevin Adrianto Nugraha

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

