Quadrotor Altitude Control using Recurrent Neural Network PID
DOI:
https://doi.org/10.12928/biste.v5i2.8455Keywords:
UAV, RNN, PID, QuadrotorAbstract
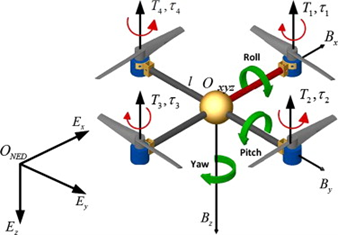
The quadrotor is one type of Unmanned Aerial Vehicle (UAV) or unmanned flying vehicle. Quadrotor can be operated by a remote controller or autonomously. Quadrotor control is a challenging problem because it takes into account complex things such as parametric uncertainty, external disturbances, and so on. At the spatial level, three linear degrees of freedom along three axes and three degrees of freedom rotating along three axes are used for the control of a quadrotor. Conventional controls for quadrotors are widely used such as PID, state feedback, and so on. However, because the control is linear, non-linear control has begun to be developed. Some of these controls, for example, use a sliding mode control system, fuzzy methods, and controls by combining linear control with artificial intelligence. This paper will use PID control and an artificial neural network for the quadrotor direction control system. The results of this control test indicate that the combination of PID and RNN on the directional control shows a better response than conventional PID.
References
L. Zhou and B. Zhang, “Quadrotor UAV Flight Control Using Backstepping Adaptive Controller,” 2020 IEEE 6th International Conference on Control Science and Systems Engineering, ICCSSE 2020, no. 2, pp. 163–166, 2020, https://doi.org/10.1109/ICCSSE50399.2020.9171967.
Q. Jing, Z. Chang, H. Chu, Y. Shao, and X. Zhang, “Quadrotor attitude control based on fuzzy sliding mode control theory,” Chinese Control Conference, CCC, vol. 2019-July, pp. 8360–8364, 2019, https://doi.org/10.23919/ChiCC.2019.8865754.
Q. Jiao, J. Liu, Y. Zhang, and W. Lian, “Analysis and design the controller for quadrotors based on PID control method,” Proceedings - 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation, YAC 2018, no. 15, pp. 88–92, 2018, https://doi.org/10.1109/YAC.2018.8406352.
Y. Cheng, L. Jiang, T. Li, and L. Guo, “Robust tracking control for a quadrotor UAV via DOBC approach,” Proceedings of the 30th Chinese Control and Decision Conference, CCDC 2018, pp. 559–563, 2018, https://doi.org/10.1109/CCDC.2018.8407194.
C. Wang, Z. Chen, Q. Sun, and Z. Qing, “Design of PID and ADRC based quadrotor helicopter control system,” Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, pp. 5860–5865, 2016, https://doi.org/10.1109/CCDC.2016.7532046.
M. K. Shaik and J. F. Whidborne, “Robust sliding mode control of a quadrotor,” 2016 UKACC International Conference on Control, UKACC Control 2016, 2016, https://doi.org/10.1109/CONTROL.2016.7737529.
T. K. Priyambodo, A. Dharmawan, and A. E. Putra, “PID self tuning control based on Mamdani fuzzy logic control for quadrotor stabilization,” in AIP Conference Proceedings, p. 020013, 2016, https://doi.org/10.1063/1.4940261.
F. F. Rahani and T. K. Priyambodo, “Penalaan Mandiri Full State Feedback dengan LQR dan JST Pada Kendali Quadrotor,” IJEIS (Indonesian Journal of Electronics and Instrumentation Systems), vol. 9, no. 1, p. 21, Apr. 2019, https://doi.org/10.22146/ijeis.37212.
J. Fei and C. Lu, “Adaptive Sliding Mode Control of Dynamic Systems Using Double Loop Recurrent Neural Network Structure,” IEEE Transactions on Neural Networks and Learning Systems, vol. 29, no. 4, pp. 1275–1286, 2018, https://doi.org/10.1109/TNNLS.2017.2672998.
H. Housny, E. Chater, and H. El Fadil, “Multi-closed-loop design for quadrotor path-tracking control,” 2019 8th International Conference on Systems and Control, ICSC 2019, pp. 27–32, 2019, https://doi.org/10.1109/ICSC47195.2019.8950659.
J. Li and W. Li, “On-Line PID Parameters Optimization Control for Wind Power Generation System Based on Genetic Algorithm,” IEEE Access, vol. 8, pp. 137094–137100, 2020, https://doi.org/10.1109/ACCESS.2020.3009240.
C.-L. Lee and C.-C. Peng, “Analytic Time Domain Specifications PID Controller Design for a Class of 2nd Order Linear Systems: A Genetic Algorithm Method,” IEEE Access, vol. 9, pp. 99266–99275, 2021, https://doi.org/10.1109/ACCESS.2021.3093427.
N. N. B. M. Mazlan, N. M. Thamrin and N. A. Razak, "Comparison Between Ziegler-Nichols and AMIGO Tuning Techniques in Automated Steering Control System for Autonomous Vehicle," 2020 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), pp. 7-12, 2020, https://doi.org/10.1109/I2CACIS49202.2020.9140089.
L. Shen and H. Xiao, “Delay-dependent robust stability analysis of power systems with PID controller,” Chinese Journal of Electrical Engineering, vol. 5, no. 2, pp. 79–86, Jun. 2019, https://doi.org/10.23919/CJEE.2019.000014.
Y. Xiang, Z. Liu, and L. Wang, “Genetic-Algorithm-Optimization-Based Predictive Functional Control for Chemical Industry Processes Against Partial Actuator Faults,” IEEE Access, vol. 8, pp. 214586–214595, 2020, https://doi.org/10.1109/ACCESS.2020.3041015.
L. Lin, A. Li, C. Xu, and Y. Wang, “Multi-Objective Genetic Algorithm Based Coordinated Second- and Third-Order Harmonic Voltage Injection in Modular Multilevel Converter,” IEEE Access, vol. 8, pp. 94318–94329, 2020, https://doi.org/10.1109/ACCESS.2020.2995293.
H. Wei et al., “Unified Multi-Objective Genetic Algorithm for Energy Efficient Job Shop Scheduling,” IEEE Access, vol. 9, pp. 54542–54557, 2021, https://doi.org/10.1109/ACCESS.2021.3070981.
D. Zhang, Z. Gao and Z. Lin, "An Online Control Approach for Forging Machine Using Reinforcement Learning and Taboo Search," in IEEE Access, vol. 8, pp. 158666-158678, 2020, https://doi.org/10.1109/ACCESS.2020.3020550.
A. A. Saadi, A. Soukane, Y. Meraihi, A. B. Gabis, and A. Ramdane-Cherif, “A Hybrid Improved Manta Ray Foraging Optimization With Tabu Search Algorithm for Solving the UAV Placement Problem in Smart Cities,” IEEE Access, vol. 11, pp. 24315–24342, 2023, https://doi.org/10.1109/ACCESS.2023.3255793.
R. Sharma, V. Kumar, P. Gaur, and A. P. Mittal, “An adaptive PID like controller using mix locally recurrent neural network for robotic manipulator with variable payload,” ISA Transactions, vol. 62, pp. 258–267, 2016, https://doi.org/10.1016/j.isatra.2016.01.016.
J. Kennedy, “Review of Engelbrecht’s fundamentals of computational swarm intelligence,” Genetic Programming and Evolvable Machines, vol. 8, no. 1, pp. 107–109, 2007, https://doi.org/10.1007/s10710-006-9020-8.
H. Lu, J. Chen, and L. Guo, “Energy Quality Management,” in Comprehensive Energy Systems, Elsevier Inc., 2018, pp. 258–314, https://doi.org/10.1016/B978-0-12-809597-3.00521-6.
N. Bacanin et al., "Artificial Neural Networks Hidden Unit and Weight Connection Optimization by Quasi-Refection-Based Learning Artificial Bee Colony Algorithm," in IEEE Access, vol. 9, pp. 169135-169155, 2021, https://doi.org/10.1109/ACCESS.2021.3135201.
J. Sun, S. Sathasivam, and M. K. B. M. Ali, “Analysis and Optimization of Network Properties for Bionic Topology Hopfield Neural Network Using Gaussian-Distributed Small-World Rewiring Method,” IEEE Access, vol. 10, pp. 95369–95389, 2022, https://doi.org/10.1109/ACCESS.2022.3204821.
S. Cong and Y. Liang, “PID-like neural network nonlinear adaptive control for uncertain multivariable motion control systems,” IEEE Transactions on Industrial Electronics, 2009, https://doi.org/10.1109/TIE.2009.2018433.
S. J. Ho, L. S. Shu, and S. Y. Ho, “Optimizing fuzzy neural networks for tuning PID controllers using an orthogonal simulated annealing algorithm OSA,” IEEE Transactions on Fuzzy Systems, 2006, https://doi.org/10.1109/TFUZZ.2006.876985.
L. R. García Carrillo, A. E. Dzul López, R. Lozano, and C. Pégard, Quad Rotorcraft Control, vol. 1. in Advances in Industrial Control, vol. 1. London: Springer London, 2013. https://doi.org/10.1007/978-1-4471-4399-4.
Y. Lei and H. Wang, "Aerodynamic Performance of a Quadrotor MAV Considering the Horizontal Wind," in IEEE Access, vol. 8, pp. 109421-109428, 2020, https://doi.org/10.1109/ACCESS.2020.3002706.
A. Ollero, “Aerial Robotic Manipulators,” in Encyclopedia of Robotics, Berlin, Heidelberg: Springer Berlin Heidelberg, 2019, pp. 1–8. https://doi.org/10.1007/978-3-642-41610-1_78-1.
Z. Tahir, “State Space System Modeling of a Quad Copter UAV,” Indian Journal of Science and Technology, vol. 8, no. 1, pp. 1–5, Jan. 2015, https://doi.org/10.17485/ijst/2016/v9i27/95239.
Y. Jiang, S. Yin, J. Dong and O. Kaynak, "A Review on Soft Sensors for Monitoring, Control, and Optimization of Industrial Processes," in IEEE Sensors Journal, vol. 21, no. 11, pp. 12868-12881, 2021, https://doi.org/10.1109/JSEN.2020.3033153.
A. B. Zakaria and A. Dharmawan, “Sistem Kendali Penghindar Rintangan Pada Quadrotor Menggunakan Konsep Linear Quadratic,” Indonesian Journal of Electronics and Instrumentation Systems, vol. 7, no. 2, pp. 219–230, 2017, https://doi.org/10.22146/ijeis.25503.
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Faisal Fajri Rahani, Phisca Aditya Rosyady

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

