Distance Estimation on Ultrasonic Sensor Using Kalman Filter
DOI:
https://doi.org/10.12928/biste.v5i2.8089Keywords:
Distance, Ultrasonic, Kalman Filter, ArduinoAbstract
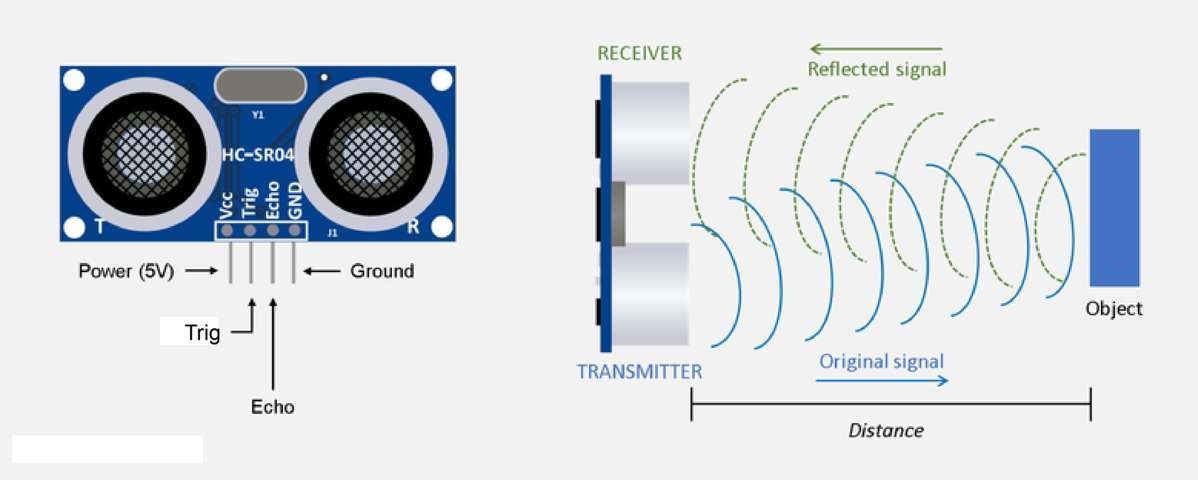
This research discusses about the distance estimation on ultrasonic sensor using Kalman Filter method. Accuracy level problem on ultrasonic sensor will be increased using Kalman Filter. Kalman Filter consists of two parts which are prediction and update. This research applies Kalman Filter method using Arduino Uno and Ultrasonic sensor HC-SR04. The test result compares the sensor data before and after Kalman Filter is applied. The test result of sensor value after given Kalman Filter depends on the value of noise sensor covariance matrix (R) and process noise covariance (Q). The best value of R and Q is 100 and 0.01. If the distance value between R and Q is too small, the filtering result will be invisible. In contrast, if the distance value between R and Q is too far, the filtering result could remove the original measured sensor data. In conclusion, applying Kalman Filter method in Ultrasonic sensor could estimate and increase the accuracy of sensor value up to 7%.
References
C. Smith, J. Satme, J. Martin, A. R. J. Downey, N. Vitzilaios, and J. Imran, “UAV rapidly-deployable stage sensor with electro-permanent magnet docking mechanism for flood monitoring in undersampled watersheds,” HardwareX, vol. 12, pp. 1–19, 2022, https://doi.org/10.1016/j.ohx.2022.e00325.
J. H. Choi, J. E. Kim, and K. T. Kim, “People counting using ir-uwb radar sensor in a wide area,” IEEE Internet Things J, vol. 8, no. 7, pp. 5806–5821, 2021, https://doi.org/10.1109/JIOT.2020.3032710.
J. Schlarp, E. Csencsics, and G. Schitter, “Optical Scanning of a Laser Triangulation Sensor for 3-D Imaging,” IEEE Trans Instrum Meas, vol. 69, no. 6, pp. 3606–3613, 2020, https://doi.org/10.1109/JIOT.2020.3032710.
F. Zhang, L. Yi, and X. Qu, “Simultaneous measurements of velocity and distance via a dual-path FMCW lidar system,” Opt Commun, vol. 474, pp. 1–6, 2020, https://doi.org/10.1016/j.optcom.2020.126066.
T. B. Asafa, T. M. Afonja, E. A. Olaniyan, and H. O. Alade, “Development of a vacuum cleaner robot,” Alexandria Engineering Journal, vol. 57, no. 4, pp. 2911–2920, 2018, https://doi.org/10.1016/j.aej.2018.07.005.
Y. Irawan, Muhardi, R. Ordila, and R. Diandra, “Automatic floor cleaning robot using arduino and ultrasonic sensor,” Journal of Robotics and Control (JRC), vol. 2, no. 4, pp. 240–243, 2021, https://doi.org/10.18196/jrc.2485.
A. Gadekar et al., “Rakshak: A modular unmanned ground vehicle for surveillance and logistics operations,” Cognitive Robotics, vol. 3, pp. 23–33, 2023, https://doi.org/10.1016/j.cogr.2023.02.001.
T. Severin and D. Soffker, “Sensor optimization for altitude estimation of spraying drones in vineyards,” in IFAC-PapersOnLine, pp. 107–112, 2022, https://doi.org/10.1016/j.ifacol.2022.11.123.
R. Guo, Y. Zhang, B. Tian, S. Xu and Z. Chen, "Height Measurement of Micro-UAVs with L-Band Staring Radar," 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, pp. 7967-7970, 2021, https://doi.org/10.1109/IGARSS47720.2021.9553143.
Q. Wang et al., "Range and Height Measurement of X-Band EM Propagation in the Marine Atmospheric Boundary Layer," in IEEE Transactions on Antennas and Propagation, vol. 67, no. 4, pp. 2063-2073, 2019, https://doi.org/10.1109/TAP.2019.2894269.
G. Montazeaud et al., “Development of a low cost open-source ultrasonic device for plant height measurements,” Smart Agricultural Technology, vol. 1, pp. 1–7, 2021, https://doi.org/10.1016/j.atech.2021.100022.
Azhari, D. Simanjuntak, L. Hakim, and Sabar, “Design and control system of temperature and water level in hydroponic plants,” in Journal of Physics: Conference Series, Institute of Physics, 2022, https://doi.org/10.1088/1742-6596/2193/1/012018.
F. Dhiaulhaq, U. Yusmaniar Oktiawati, and I. V Paputungan, “Designing Arduino-Based Devices for Fluid Height Monitor,” in 2020 8th International Conference on Cyber and IT Service Management, CITSM 2020, Institute of Electrical and Electronics Engineers Inc., 2020, pp. 1–4, 2020, https://doi.org/10.1109/CITSM50537.2020.9268835.
A. K. Sahoo and S. K. Udgata, "A Novel ANN-Based Adaptive Ultrasonic Measurement System for Accurate Water Level Monitoring," in IEEE Transactions on Instrumentation and Measurement, vol. 69, no. 6, pp. 3359-3369, 2020, https://doi.org/10.1109/TIM.2019.2939932.
Y. Saragih, J. H. Prima Silaban, H. Aliya Roostiani and S. A. Elisabet, "Design of Automatic Water Flood Control and Monitoring Systems in Reservoirs Based on Internet of Things (IoT)," 2020 3rd International Conference on Mechanical, Electronics, Computer, and Industrial Technology (MECnIT), pp. 30-35, 2020, https://doi.org/10.1109/MECnIT48290.2020.9166593.
J. Susilo, A. Febriani, U. Rahmalisa and Y. Irawan, “Car parking distance controller using ultrasonic sensors based on arduino uno,” Journal of Robotics and Control (JRC), vol. 2, no. 5, pp. 353-356, 2021, https://doi.org/10.18196/jrc.25106.
W. A. Jabbar, C. W. Wei, N. A. A. M. Azmi, and N. A. Haironnazli, “An IoT Raspberry Pi-based parking management system for smart campus,” Internet of Things (Netherlands), vol. 14, 2021, https://doi.org/10.1016/j.iot.2021.100387.
A. Ma’arif, I. Iswanto, A. A. Nuryono, and R. I. Alfian, “Kalman Filter for Noise Reducer on Sensor Readings,” Signal and Image Processing Letters, vol. 1, no. 2, pp. 11–22, Jul. 2019, https://doi.org/10.31763/simple.v1i2.2.
R. I. Alfian, A. Ma’Arif, and S. Sunardi, “Noise reduction in the accelerometer and gyroscope sensor with the Kalman filter algorithm,” Journal of Robotics and Control (JRC), vol. 2, no. 3, pp. 180–189, 2021, https://doi.org/10.18196/jrc.2375.
I. Iswanto, A. Ma’arif, N. Maharani Raharja, T. K. Hariadi, and M. A. Shomad, “Using a Combination of PID Control and Kalman Filter to Design of IoT-based Telepresence Self-balancing Robots during COVID-19 Pandemic,” Emerging Science Journal, vol. 4, no. Special issue, pp. 241–261, 2020, https://doi.org/10.28991/esj-2021-SP1-016.
K. A. Raza and W. Monnet, “Moving Objects Detection and Direction-Finding with HC-SR04 Ultrasonic Linear Array,” in International Engineering Conference (IEC), pp. 153–158, 2019, https://doi.org/10.1109/IEC47844.2019.8950639.
P. P. Kulkarni, S. R. Kutre, S. S. Muchandi, P. Patil and S. Patil, "Unmanned Ground Vehicle for Security and Surveillance," 2020 IEEE International Conference for Innovation in Technology (INOCON), pp. 1-5, 2020, https://doi.org/10.1109/INOCON50539.2020.9298296.
E. Prayetno et al., “PLTD Engine Tank Oil Volume Monitoring System using HC-SR04 Ultrasonic Sensor Based on Internet of Things (IoT),” International Journal of Electrical, Energy and Power System Engineering (IJEEPSE), vol. 4, no. 1, pp. 134–138, 2021, https://doi.org/10.31258/ijeepse.4.1.134-138.
P. A. Darwito, M. Raditya, H. Sa’diyah, A. Cikadiarta and W. Aditya, "Comparative Study of Burst And Beams Types Ultrasonic Sensor For Distance Measurements," 2019 International Seminar on Intelligent Technology and Its Applications (ISITIA), pp. 46-51, 2019, https://doi.org/10.1109/ISITIA.2019.8937133.
L. Reddy Cenkeramaddi, J. Bhatia, A. Jha, S. Kumar Vishkarma and J. Soumya, "A Survey on Sensors for Autonomous Systems," 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), pp. 1182-1187, 2020, https://doi.org/10.1109/ICIEA48937.2020.9248282.
M. Wachsmuth, A. Koppert, L. Zhang and V. Schwieger, "Development of an error-state Kalman Filter for Emergency Maneuvering of Trucks," 2020 European Navigation Conference (ENC), pp. 1-7, 2020, https://doi.org/10.23919/ENC48637.2020.9317306.
R. V. Garcia, P. C. P. M. Pardal, H. K. Kuga, and M. C. Zanardi, “Nonlinear filtering for sequential spacecraft attitude estimation with real data: Cubature Kalman Filter, Unscented Kalman Filter and Extended Kalman Filter,” Advances in Space Research, vol. 63, no. 2, pp. 1038–1050, 2019, https://doi.org/10.1016/j.asr.2018.10.003.
I. Ullah, Y. Shen, X. Su, C. Esposito, and C. Choi, “A Localization Based on Unscented Kalman Filter and Particle Filter Localization Algorithms,” IEEE Access, vol. 8, pp. 2233–2246, 2020, https://doi.org/10.1109/ACCESS.2019.2961740.
I. Ullah, Y. Shen, X. Su, C. Esposito and C. Choi, "A Localization Based on Unscented Kalman Filter and Particle Filter Localization Algorithms," in IEEE Access, vol. 8, pp. 2233-2246, 2020, https://doi.org/10.1109/ACCESS.2019.2961740.
P. J. van Leeuwen, “A consistent interpretation of the stochastic version of the Ensemble Kalman Filter,” Quarterly Journal of the Royal Meteorological Society, vol. 146, no. 731, pp. 2815–2825, 2020, https://doi.org/10.1002/qj.3819.
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Haryo Setiawan, Alfian Ma'arif, Hamzah M Marhoon, Abdel-Nasser Sharkawy, Abdullah Çakan

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

