An Integrated and Lightweight Control Framework for Solar-Powered Assistive Robots: Combining Adaptive Fuzzy Energy Management, Multi-Modal HRI, and Secure Communication
DOI:
https://doi.org/10.12928/biste.v8i2.15190Keywords:
Adaptive Fuzzy Control, Lightweight Cryptography, Assistive Robotics, Electrooculography, IoT SecurityAbstract
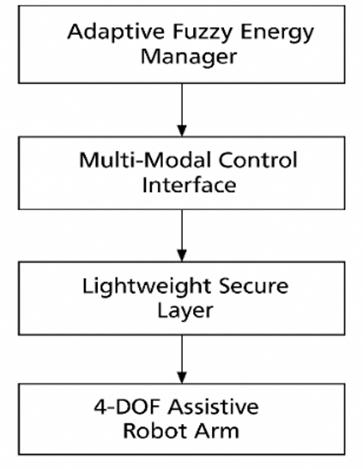
The current assistive robotics platforms tend to be unable to keep up with the unpredictable nature of renewable sources of energy, the lack of processing capacity, and the growing security risks. In this work, the integrated control architecture is introduced where the aspects of energy management, computation efficiency, and interaction reliability are considered in one and lightweight framework. The study paper contribution is the creation of a single architecture that integrates adaptive fuzzy energy control with multi-channel eye-gaze communication and IoT-based security, tailored to compute economically and resource-limited microcontroller processor designs. The approach combines the Adaptive Fuzzy Energy Manager (AFEM) of real-time power operation, Multi-Modal Control Interface (MMCI) based on electrooculography (EOG) in addition to the depth estimation of vision, and Lightweight Secure Communication Layer (LSCL) that employs 128-bit permutation-based encryption. The experimental test of the system was performed with a robotic arm of the 4-DOF with 150W PV-battery unit powered by an Arduino Mega. Experimental results demonstrate that the overall accuracy of EOG command classification was high at 97.8% and the location of the end-effector was positioned precisely with an error of less than 2 mm. AFEM values were sufficient to ensure state-of-charge of the battery was not less than 88 percent under varying sun irradiance and security layer was maintained to give low processing latency of less than 5 ms. The suggested framework is highly operational efficient and also interaction reliable rendering it applicable to deploy in the resource constrained resources in assistive and telemedicine settings.
References
M. Cavus, D. Dissanayake, and M. C. Bell, “Deep-Fuzzy Logic Control for Optimal Energy Management: A Predictive and Adaptive Framework for Grid-Connected Microgrids,” Energies, vol. 18, no. 4, p. 995, 2025, https://doi.org/10.3390/en18040995.
F. Naseer, M. N. Khan, M. Tahir, A. Addas, and H. Kashif, “Enhancing Elderly Care With Socially Assistive Robots: A Holistic Framework for Mobility, Interaction, and Well-Being,” IEEE Access, vol. 13, pp. 82698–82717, 2025, https://doi.org/10.1109/access.2025.3567331.
M. Raghupathi, S. Dhanraj, N. Poyyamozhi, and K. K. Priya, “Optimized Multi-Objective Energy Management Strategy for Solar-Fuel Cell Hybrid Electric Vehicles using RSM and SFOA,” Results in Engineering, vol. 28, p. 107106, 2025, https://doi.org/10.1016/j.rineng.2025.107106.
L. Sørensen, D. T. S. Johannesen, H. Melkas, and H. M. Johnsen, “User Acceptance of a Home Robotic Assistant for Individuals With Physical Disabilities: Explorative Qualitative Study,” JMIR Rehabilitation and Assistive Technology, vol. 12, p. e63641, 2025, https://doi.org/10.2196/63641.
M. Şen, M. Özcan, and Y. R. Eker, “Fuzzy Logic-Based Energy Management System for Regenerative Braking of Electric Vehicles with Hybrid Energy Storage System,” Applied Sciences, vol. 14, no. 7, p. 3077, 2024, https://doi.org/10.3390/app14073077.
Q. Zhang, B. Li, and F. Sun, “Visual Servo Tracking Control and Scene Depth Identification of Mobile Robots with Velocity Saturation Constraints,” Mathematics, vol. 13, no. 5, p. 790, 2025, https://doi.org/10.3390/math13050790.
M. Kumar, S. Sen, S. Kumar, and J. Samantaray, “An Adaptive Fuzzy Controller-Based Distributed Voltage Control Strategy for a Remote Microgrid System With Solar Energy and Battery Support,” IEEE Transactions on Industry Applications, vol. 60, no. 3, pp. 4870–4887, 2024, https://doi.org/10.1109/TIA.2024.3350577.
M. Ali, M. Ahmad, and M. A. Koondhar, “A Fuzzy-Based Adaptive P&O MPPT Algorithm for PV Systems With Fast Tracking and Low Oscillations Under Rapidly Irradiance Change Conditions,” IEEE Access, vol. 12, pp. 84374–84386, 2024, https://doi.org/10.1109/ACCESS.2024.10552843.
M. Tavakoli-Kakhki, “SIT2FPC: Supervisory Interval Type-2 Fuzzy Predictive Control for Microgrid Energy Management,” IEEE Systems Journal, vol. 19, 2025, https://doi.org/10.1109/JSYST.2025.3544320.
K.-D. Nguyen, T.-K. Dang, B. Kieu-Do-Nguyen, D.-H. Le, C.-K. Pham, and T.-T. Hoang, “ASIC Implementation of ASCON Lightweight Cryptography for IoT Applications,” IEEE Transactions on Circuits and Systems II: Express Briefs, vol. 72, no. 1, pp. 278–282, 2025, https://doi.org/10.1109/TCSII.2024.3483214.
G. Öztürk, M. E. Çimen, Ü. Çavuşoğlu, O. Eldoğan, and D. Karayel, “Secure and Efficient Data Encryption for Internet of Robotic Things via Chaos-Based Ascon,” Applied Sciences, vol. 15, no. 19, p. 10641, 2025, https://doi.org/10.3390/app151910641.
I. Radhakrishnan, S. Jadon, and P. B. Honnavalli, “Efficiency and Security Evaluation of Lightweight Cryptographic Algorithms for Resource-Constrained IoT Devices,” Sensors, vol. 24, no. 12, p. 4008, 2024, https://doi.org/10.3390/s24124008.
N. Hediyal and D. B.P., “NDN: An Ultra-Lightweight Block Cipher to Secure IoT Nodes,” International Journal of Computer Networks and Applications, vol. 12, no. 2, pp. 227–251, 2025, https://doi.org/10.22247/ijcna/2025/15.
Y. Guo, W. Liu, W. Chen, Q. Yan, and Y. Lu, “ECLBC: A Lightweight Block Cipher With Error Detection and Correction Mechanisms,” IEEE Internet of Things Journal, vol. 11, no. 12, pp. 21727–21740, 2024, https://doi.org/10.1109/JIOT.2024.3376527.
N. Zendehdel, K. G. Zadeh, H. Chen, Y. S. Song, and M. C. Leu, “Hands-Free UAV Control: Real-Time Eye Movement Detection Using EOG and LSTM Networks,” IEEE Access, vol. 13, pp. 101853–101864, 2025, https://doi.org/10.1109/ACCESS.2025.3578558.
Y. Ding, P. Tang, J. Li, C. Zeng, Y. Sun, Y. Zhang, and W. Liu, “Study for Electrooculography Character Input Based on Dual-Channel CNN of Movement Disorder Patients,” IEEE Access, vol. 12, pp. 101865–101877, 2024, https://doi.org/10.1109/ACCESS.2024.3432130.
H. Kosnacova et al., “Pilot Experiments and Hardware Design of Smart Electrooculographic Headband for People With Muscular Paralysis,” IEEE Access, vol. 12, pp. 49106–49121, 2024, https://doi.org/10.1109/ACCESS.2024.3379140.
A. Palumbo et al., “An Innovative Device Based on Human-Machine Interface (HMI) for Powered Wheelchair Control for Neurodegenerative Disease: A Proof-of-Concept,” Sensors, vol. 24, no. 15, p. 4774, 2024, https://doi.org/10.3390/s24154774.
M. A. Zeddini, S. Krim, M. Mansouri, M. F. Mimouni, and A. Sakly, “Fuzzy Logic Adaptive Crow Search Algorithm for MPPT of a Partially Shaded Photovoltaic System,” IEEE Access, vol. 12, pp. 119246–119271, 2024, https://doi.org/10.1109/ACCESS.2024.3434523.
R. Wei et al., “Absolute Monocular Depth Estimation on Robotic Visual and Kinematics Data via Self-Supervised Learning,” IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 4269–4282, 2025, https://doi.org/10.1109/TASE.2024.3409392.
Q. He, G. Feng, S. Bano, D. Stoyanov, and S. Zuo, “MonoLoT: Self-Supervised Monocular Depth Estimation in Low-Texture Scenes for Automatic Robotic Endoscopy,” IEEE Journal of Biomedical and Health Informatics, vol. 28, no. 10, pp. 6078–6091, 2024, https://doi.org/10.1109/JBHI.2024.3423791.
F. Söğüt, H. Yanık, E. Değirmenci, İ. Kesilmiş, and Ü. Çömelekoğlu, “Automated detection of quiet eye durations in archery using electrooculography and comparative deep learning models,” BMC Sports Science, Medicine and Rehabilitation, vol. 17, no. 1, p. 234, 2025, https://doi.org/10.1186/s13102-025-01284-2.
Z. Li, B. Lai, and Y. Pan, “Image-Based Composite Learning Robot Visual Servoing With an Uncalibrated Eye-to-Hand Camera,” IEEE/ASME Transactions on Mechatronics, vol. 29, no. 4, pp. 2499–2509, 2024, https://doi.org/10.1109/TMECH.2023.3341914.
L. Ebner, G. Billings, and S. Williams, “Metrically Scaled Monocular Depth Estimation through Sparse Priors for Underwater Robots,” in 2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 3751–3757, 2024, https://doi.org/10.1109/ICRA57147.2024.10611007.
L. Tong, K. Song, H. Tian, Y. Man, Y. Yan, and Q. Meng, “A Novel RGB-D Cross-Background Robot Grasp Detection Dataset and Background-Adaptive Grasping Network,” IEEE Transactions on Instrumentation and Measurement, vol. 73, pp. 1–15, 2024, https://doi.org/10.1109/TIM.2024.3413164.
J. Luo, J. Zhu, Z. Zhang, and W. Bai, “Uncalibrated 6-DoF Robotic Grasping With RGB-D Sensor: A Keypoint-Driven Servoing Method,” IEEE Sensors Journal, vol. 24, no. 7, pp. 11472–11483, 2024, https://doi.org/10.1109/JSEN.2024.3367498.
S. M. Yasir and H. Ahn, “Deep Neural Networks for Accurate Depth Estimation with Latent Space Features,” Biomimetics, vol. 9, no. 12, p. 747, 2024, https://doi.org/10.3390/biomimetics9120747.
W. Villegas-Ch, R. Gutierrez, A. M. Navarro, and A. Mera-Navarrete, “Lightweight Blockchain for Authentication and Authorization in Resource-Constrained IoT Networks,” IEEE Access, vol. 13, pp. 48049–48063, 2025, https://doi.org/10.1109/ACCESS.2025.3551261.
G. Cagua, V. Gauthier-Umaña, and C. Lozano-Garzon, “Implementation and Performance of Lightweight Authentication Encryption ASCON on IoT Devices,” IEEE Access, vol. 13, pp. 16671–16682, 2025, https://doi.org/10.1109/ACCESS.2025.3529757.
Y. S. Vaz, J. C. B. Mattos, and R. I. Soares, “Lightweight AES Algorithm for Internet of Things: An Energy Consumption Analysis,” in 2024 XIV Brazilian Symposium on Computing Systems Engineering (SBESC), pp. 1–6, 2024, https://doi.org/10.1109/SBESC65055.2024.10771922.
A. Hasan and M. M. A. Hashem, “A Lightweight Cryptographic Framework Based on Hybrid Cellular Automata for IoT Applications,” IEEE Access, vol. 12, pp. 192672–192688, 2024, https://doi.org/10.1109/ACCESS.2024.3519673.
M. Imdad et al., “DNA-PRESENT: An Improved Security and Low-Latency, Lightweight Cryptographic Solution for IoT,” Sensors, vol. 24, no. 24, p. 7900, 2024, https://doi.org/10.3390/s24247900.
M. Melhaoui et al., “Hybrid fuzzy logic approach for enhanced MPPT control in PV systems,” Scientific Reports, vol. 15, p. 19235, 2025, https://doi.org/10.1038/s41598-025-03154-w.
S. Neelagiri, S. Babu, and S. Biradar, “A fuzzy logic approach to sustainable energy management in standalone microgrids,” International Journal of Applied Power Engineering, vol. 14, no. 4, pp. 999–1010, 2025, https://doi.org/10.11591/ijape.v14.i4.pp999-1010.
T. Aljohani, “Intelligent Type-2 Fuzzy Logic Controller for Hybrid Microgrid Energy Management with Different Modes of EVs Integration,” Energies, vol. 17, no. 12, p. 2949, 2024, https://doi.org/10.3390/en17122949.
F. Çakmak, Z. Aydoğmuş, and M. R. Tür, “Analyses of PO-Based Fuzzy Logic-Controlled MPPT and Incremental Conductance MPPT Algorithms in PV Systems,” Energies, vol. 18, no. 2, p. 233, 2025, https://doi.org/10.3390/en18020233.
A. Fischer-Janzen, T. M. Wendt, and K. Van Laerhoven, “A scoping review of gaze and eye tracking-based control methods for assistive robotic arms,” Frontiers in Robotics and AI, vol. 11, p. 1326670, 2024, https://doi.org/10.3389/frobt.2024.1326670.
H. R. Mahmood et al., “Eye Movement Classification using Feature Engineering and Ensemble Machine Learning,” Engineering, Technology & Applied Science Research, vol. 14, no. 6, pp. 18509–18517, 2024, https://doi.org/10.48084/etasr.9115.
M. G. Kurian and Y. Chen, “Lightweight, Post-Quantum Secure Cryptography Based on Ascon: Hardware Implementation in Automotive Applications,” Electronics, vol. 13, no. 22, p. 4550, 2024, https://doi.org/10.3390/electronics13224550.
A. Sharma, R. Suganya, P. B. Krishna, R. Raj, and R. K. Murugesan, “Network Efficient Hierarchical Authentication Algorithm for Secure Communication in IoT and IoE,” IEEE Access, vol. 12, pp. 195925–195938, 2024, https://doi.org/10.1109/ACCESS.2024.3516886.
M. I. Guerra, F. M. de Araújo, J. T. de Carvalho Neto, and R. G. Vieira, “Survey on adaptative neural fuzzy inference system (ANFIS) architecture applied to photovoltaic systems,” Energy Systems, vol. 15, no. 2, pp. 505-541, 2024, https://doi.org/10.1007/s12667-022-00513-8.
T. Wang, P. Zheng, S. Li, and L. Wang, “Multimodal human–robot interaction for human‐centric smart manufacturing: a survey,” Advanced Intelligent Systems, vol. 6, no. 3, p. 2300359, 2024, https://doi.org/10.1002/aisy.202300359.
W. Robert, A. Denis, A. Thomas, A. Samuel, S. P. Kabiito, Z. Morish, and G. Ali, “A comprehensive review on cryptographic techniques for securing internet of medical things: A state-of-the-art, applications, security attacks, mitigation measures, and future research direction,” Mesopotamian Journal of Artificial Intelligence in Healthcare, vol. 2024, pp. 135-169, 2024, https://doi.org/10.58496/MJAIH/2024/016.
K. -B. Park, S. H. Choi, J. Y. Lee, Y. Ghasemi, M. Mohammed and H. Jeong, "Hands-Free Human–Robot Interaction Using Multimodal Gestures and Deep Learning in Wearable Mixed Reality," in IEEE Access, vol. 9, pp. 55448-55464, 2021, https://doi.org/10.1109/ACCESS.2021.3071364.
M. Hassan and E. Beshr, "Single-Rate Energy-Aware Motion Control for Solar-Assisted Mobile Robots in Agricultural Environments," 2025 IEEE International Conference on Green Energy and Smart Systems (GESS), pp. 1-5, 2025, https://doi.org/10.1109/GESS67704.2025.11297185.
S. Hafeez et al., "Blockchain-Assisted UAV Communication Systems: A Comprehensive Survey," in IEEE Open Journal of Vehicular Technology, vol. 4, pp. 558-580, 2023, https://doi.org/10.1109/OJVT.2023.3295208.
B. T. Sayed et al., “Real-time vision-based obstacle avoidance for mobile robots using lightweight monocular depth estimation and behavior-driven control,” Journal of the Brazilian Society of Mechanical Sciences and Engineering, vol. 47, no. 12, pp. 1-51, 2025, https://doi.org/10.1007/s40430-025-06053-3.
J. Marchang and A. Di Nuovo, “Assistive multimodal robotic system (AMRSys): security and privacy issues, challenges, and possible solutions,” Applied Sciences, vol. 12, no. 4, p. 2174, 2022, https://doi.org/10.3390/app12042174.
D. K. Sah, S. Almujaiwel, K. Cengiz and I. Alrashdi, "Energy-Efficient Task Allocation for IIoT Deep Learning Applications: An Embedded Edge Clusters Solution," in IEEE Internet of Things Journal, vol. 12, no. 17, pp. 34900-34909, 2025, https://doi.org/10.1109/JIOT.2025.3586469.
D. Wang et al., "Gaze and Go: Harnessing Visual Attention Valence in Upper-Limb Robotic Rehabilitation With Tailored Gamification and Eye Tracking for Neuroplasticity," 2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 9455-9461, 2025, https://doi.org/10.1109/ICRA55743.2025.11127634.
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Abulfadhel Amer Saihood Altufaili, Ayad Muslim Hamzah, Suham A Albderi, Dunya Mohammed Shleej

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

