Comparative Performance Analysis of LQR Based PSO and Fuzzy Logic Control for Active Car Suspension
DOI:
https://doi.org/10.12928/biste.v7i3.13237Keywords:
LQR, Fuzzy PD, PID, PSO, Suspension SystemAbstract
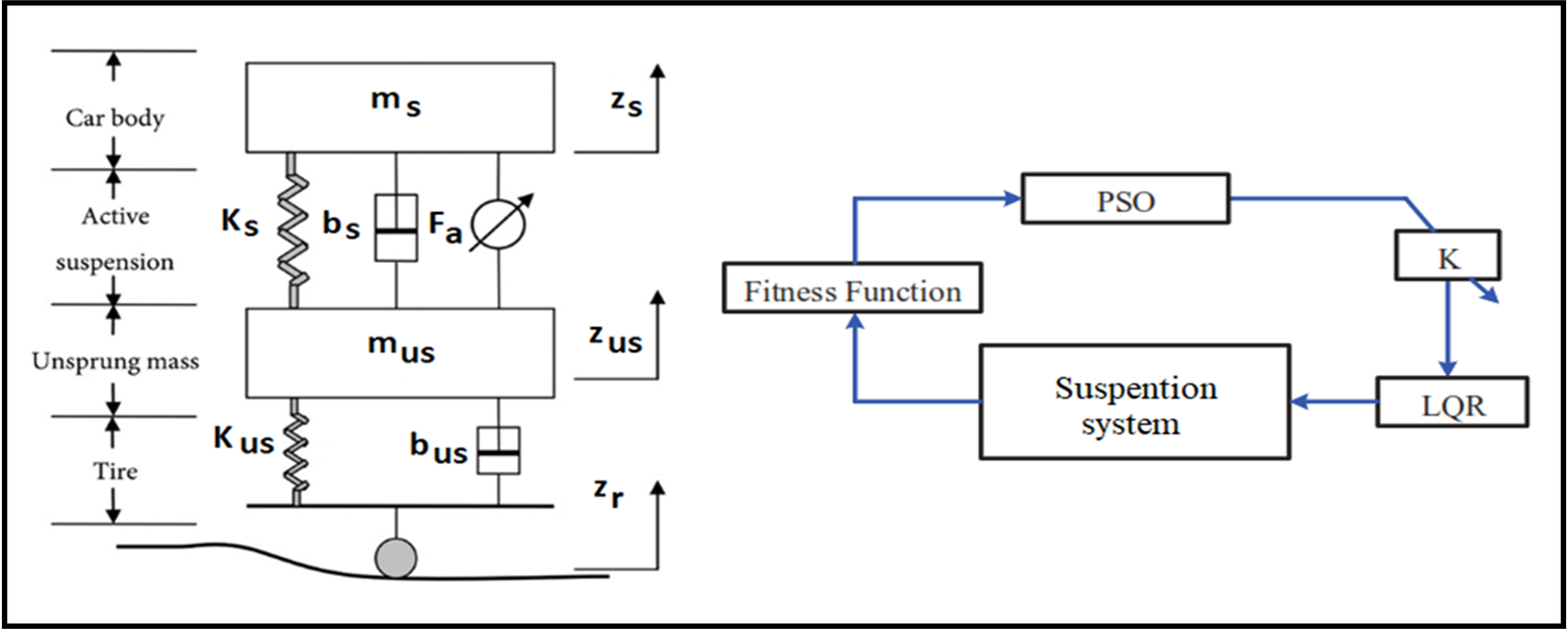
This study proposes a diffrent control strategy for active car suspension systems, comparing the performance of Proportional-Integral-Derivative (PID), Linear Quadratic Regulator (LQR), and fuzzy PD controller in optimizing ride comfort and handling. These methods were selected for their complementary strengths: PID for simplicity and industrial adoption, LQR for optimality in handling trade-offs between ride comfort and suspension travel, and fuzzy PD for adaptability to nonlinearities and road disturbances. A 4-DOF quarter-car model is employed to simulate vehicle dynamics, with road disturbances modeled as step and sinusoidal inputs. The PID controller is tuned using built-in tools such as the PID tuner app, while the LQR’s weighting matrices (Q and R) were optimized offline using PSO. The optimized weights were then substituted into the algebraic Riccati equation to derive the final feedback control gains, ensuring optimal performance while adhering to classical LQR theory. For the fuzzy PD controller, membership functions and rule bases are designed to adaptively adjust gains under varying road conditions. Simulation results demonstrate that the PSO-tuned LQR and fuzzy PD controllers outperform conventional PID by reducing body vertical displacement by 61% and 23%, respectively, and overshoot by 75% (fuzzy PD) and 60.2% (LQR) under step excitation. The LQR controller based PSO also shows superior adaptability to stochastic road inputs and minimizing the control signal by 83.3% compared to PID. By integrating PSO-based LQR gain optimization and adaptive fuzzy logic, this work advances active suspension control, offering a quantifiably superior alternative to classical approaches. This study contributes to the technological development of the automotive world in order to provide comfort and safety for the passenger under different conditions, which contributes to the design of more comfortable vehicles with better performance in the future.
References
M. Issa and A. Samn, “Passive vehicle suspension system optimization using Harris Hawk Optimization algorithm,” Mathematics and Computers in Simulation, vol. 191, pp. 328-45, 2022, https://doi.org/10.1016/j.matcom.2021.08.016.
D. N. Nguyen and T. A. Nguyen, "The dynamic model and control algorithm for the active suspension system," Math. Probl. Eng., vol. 2023, pp. 1–9, 2023, https://doi.org/10.1155/2023/2889435.
Z. G. Peng et al., “Research on air suspension control system based on fuzzy control,” Energy Procedia, vol. 105, pp. 2653–2659, 2017, https://doi.org/10.1016/j.egypro.2017.03.770.
T. A. Nguyen, “Advance the stability of the vehicle by using the pneumatic suspension system integrated with the hydraulic actuator,” Lat. Am. J. Solids Struct., vol. 18, no. 7, 2021, https://doi.org/10.1590/1679-78256621.
Y. M. Khedkar, “A review of magnetorheological fluid damper technology and its applications,” Int. Rev. Mech. Eng., vol. 13, no. 4, pp. 256–264, 2019, https://doi.org/10.15866/ireme.v13i4.17224.
H. Basargan et al., “An LPV-based online reconfigurable adaptive semi-active suspension control with MR damper,” Energies, vol. 15, no. 10, p. 3648, 2022, https://doi.org/10.3390/en15103648.
T. A. Nguyen, “Study on the sliding mode control method for the active suspension system,” Int. J. Appl. Sci. Eng., vol. 18, no. 5, p. 2021069, 2021, https://doi.org/10.6703/IJASE.202109_18(5).006.
N. T. Anh, “Control an active suspension system by using PID and LQR controller,” Int. J. Mech. Prod. Eng. Res. Dev., vol. 10, no. 3, pp. 7003–7012, 2020, https://doi.org/10.24247/ijmperdjun2020662.
T. Nguyen, “Applying a PID-SMC synthetic control algorithm to the active suspension system to ensure road holding and ride comfort,” Plos one, vol. 18, no. 10, p. e0283905, 2023, https://doi.org/10.1371/journal.pone.0283905
T. A. Nguyen, “Improving the comfort of the vehicle based on using the active suspension system controlled by the double-integrated controller,” Shock Vib., vol. 2021, no. 1, p. 1426003, 2021, https://doi.org/10.1155/2021/1426003.
S. Kumar and A. Medhavi, “Active and passive suspension system performance under random road profile excitations,” Int. J. Acoust. Vib., vol. 25, no. 4, pp. 532–541, 2020, https://doi.org/10.20855/ijav.2020.25.41702.
N. Uddin, “Optimal control design of active suspension system based on quarter car model,” J. Infotel, vol. 11, no. 2, pp. 55–61, 2019, https://doi.org/10.20895/infotel.v11i2.429.
H. Pang et al., “Design of LQG controller for active suspension without considering road input signals,” Shock Vib., vol. 2017, no. 1, p. 6573567, 2017, https://doi.org/10.1155/2017/6573567.
T. Nguyen, “Control an Active Suspension System by Using PID and LQR Controller,” International Journal of Mechanical Engineering, vol. 10, no. 3, pp. 7003-7012, 2020, https://doi.org/10.24247/ijmperdjun2020662.
N. Huang, “Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay,” IEEE Trans., vol. 50, pp. 2639–2650, 2019, https://doi.org/10.1109/TCYB.2019.2894724.
M. Bakouri et al., “Robust dynamic control algorithm for uncertain powered wheelchairs based on sliding neural network approach,” AIMS Mathematics, vol. 8, no. 11, pp. 26821-26839 2023, https://doi.org/10.3934/math.20231373.
X. Zhang, L. Liu, and Y.-J. Liu, “Adaptive NN control based on Butterworth low-pass filter for quarter active suspension systems with actuator failure,” AIMS Mathematics, vol. 5, no. 6, pp. 9990-10010, 2020, https://doi.org/10.3934/math.2021046.
I. Attawil et al., “Enhancing Lateral Control of Autonomous Vehicles through Adaptive Model Predictive Control,” IEEE 4th International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), pp. 148-155, 2024, https://doi.org/10.1109/MI-STA61267.2024.10599733.
A. Sharkawy,“Fuzzy and adaptive fuzzy control for the automobiles’ active suspension system,” International Journal of Vehicle Mechanics and Mobility, vol. 43, no. 11, 2005, https://doi.org/10.1080/00423110500097783.
F. Zhao, S. Ge, and F. Tu, “Adaptive Neural Network Control for Active Suspension System with Actuator Saturation,” IET Control Theory & Applications, vol. 10, no. 14, 2016, https://doi.org/10.1049/iet-cta.2015.1317.
Z. Yu and S. F. Wong, "Adaptive nonlinear control of wheelchair with independent active suspension system," 2017 29th Chinese Control And Decision Conference (CCDC), pp. 3741-3746, 2017, https://doi.org/10.1109/CCDC.2017.7979155.
I. G. Jang, “Development of active suspension system for wheelchairs to improve riding comfort of gait disorders,” International Journal of Advanced Mechanical Engineering, vol. 7, no. 5, pp. 213-219, 2020, https://doi.org/10.9718/JBER.2020.41.5.203.
A. Abougarair, A. Oun and A. Emhemmed, "Intelligent Control Design for Linear Model of Active Suspension System," 2018 30th International Conference on Microelectronics (ICM), pp. 17-20, 2018, https://doi.org/10.1109/ICM.2018.8703995.
V. Mai, D. Yoon, and S. Choi, “Explicit model predictive control of semi-active suspension systems with magneto-rheological dampers subject to input constraints,” Journal of Intelligent Material Systems and Structures, vol. 31, no. 10, 2020, https://doi.org/10.1177/1045389X20914404.
Z. Zheship, J. Zhang and H. Yin, “Bio-inspired structure reference model oriented robust full vehicle active suspension system control via constraint-following,” Mechanical Systems and Signal Processing, vol. 179, no. 4, 2022, https://doi.org/10.1016/j.ymssp.2022.109368.
M. Aboud, A. Abougarair and A. Emhemmed, "Robust H-Infinity Controller Synthesis Approach for Uncertainties System," 2023 IEEE 11th International Conference on Systems and Control (ICSC), pp. 506-511, 2023, https://doi.org/10.1109/ICSC58660.2023.10449693.
M. Aburakhis et al., “Performance of anti-lock braking systems based on adaptive and intelligent control methodologies,” Indonesian Journal of Electrical Engineering and Informatics (IJEEI), vol. 10, no. 3, pp. 626-643, 2022, https://doi.org/10.52549/ijeei.v10i3.3794.
H. Zhang and C. Zhou, “An Energy Efficient Control Strategy for Electric Vehicle Driven by In-Wheel-Motors Based on Discrete Adaptive Sliding Mode Control,” Chinese Journal of Mechanical Engineering, vol. 36, no. 58, 2023, https://doi.org/10.1186/s10033-023-00878-6.
J. Wang, A. C. Zolas, and D. A. Wilson, “Active suspension: a reduced-order control design study,” Proc. Mediterranean Conf. Control Autom., vol. T31-051, pp. 27–29, 2021, https://doi.org/10.1109/MED.2007.4433734.
A. Mohite and A. Mitra, Development and Validation of Non-linear Suspension System, Journal of Mechanical and Civil Engineering (IOSR-JMCE), 6th National Conference RDME 2017, pp. 06-11, 2017, https://doi.org/10.9790/1684-17010010611.
M. Edardar et al., “Lyapunov Redesign of Piezo-Actuator for Positioning Control,” 9 th International Conference on Systems and Control (ICSC), pp.499-503, 2021, https://doi.org/10.1109/ICSC50472.2021.9666594.
G. Shelke and A. Mitra , “Validation of Simulation and Analytical Model of Nonlinear Passive Vehicle Suspension System for Quarter Car,” materialstoday: Proceeding, vol. 5, no. 9, pp. 19294-19302, 2018, https://doi.org/10.1016/j.matpr.2018.06.288,
R. Jordehi, “Particle swarm optimization for dynamic optimization: A review,” Renew. Sustain. Energy Rev., vol. 52, pp. 1360–1367, 2015, https://doi.org/10.1007/s00521-014-1661-6.
A. J. Abougarair, "Adaptive Neural Networks Based Optimal Control for Stabilizing Nonlinear System," 2023 IEEE 3rd International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), pp. 141-148, 2023, https://doi.org/10.1109/MI-STA57575.2023.10169340.
D. Nguyen and T. Nguyen, “The dynamic model and control algorithm for the active suspension system,” Math. Probl. Eng., vol. 2023, no. 1, p. 2889435, 2023, https://doi.org/10.1155/2023/2889435.
A. Alaktiwi, et al., Adaptive Control Approach for Optimized Lane Keeping in Autonomous Vehicles, Sebha University Conference Proceedings, vol. 4, no. 1, pp. 147-256, 2025, https://doi.org/10.51984/sucp.v4i1.3956.
A. F. Zrigan, A. J. Abougarair, M. K. Elmezughi and A. M. Almaktoof, "Optimized PID Controller and Generalized Inverted Decoupling Design for MIMO System," 2023 IEEE International Conference on Advanced Systems and Emergent Technologies (IC_ASET), pp. 1-6, 2023, https://doi.org/10.1109/IC_ASET58101.2023.10150957.
E. Alfian et al., “Optimizing light intensity with PID control,” Control Syst. Optim. Lett., vol. 1, no. 3, 2023, https://doi.org/10.59247/csol.v1i3.38.
A. Akbar et al., “Implementing PID control on Arduino Uno for air temperature optimization,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 6, no. 1, 2024, https://doi.org/10.12928/biste.v6i1.9725.
A. J. Abougarair, A. A. Oun and I. Alkaber, "Comparative Evaluation of PID Controller Tuning through Conventional and Genetic Algorithm," 2024 IEEE 4th International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), pp. 176-181, 2024, https://doi.org/10.1109/MI-STA61267.2024.10599722.
A. H. Mohamed, D. Abidou and S. A. Maged, "LQR and PID Controllers Performance on a Half Car Active Suspension System," 2021 International Mobile, Intelligent, and Ubiquitous Computing Conference (MIUCC), pp. 48-53, 2021, https://doi.org/10.1109/MIUCC52538.2021.9447609.
M. Eroglu, M. A. Koç, R. Kozan, and I. Esen, "Comparative analysis of full car model with driver using PID and LQR controllers," Int. J. Automot. Sci. Technol., vol. 6, no. 2, pp. 178–188, 2022, https://doi.org/10.30939/ijastech..1076443.
S. I. Abdelmaksoud, M. H. Al-Mola, and M. S. Al-Aayedh, "Multi-assessment operational efficiency of quarter car suspension system via PID, FOPID, and ANFIS controllers," in 2024 Int. Conf. Innov. Eng. Technol. (ICIET), pp. 1–6, 2024, https://doi.org/10.1109/ICIESTR60916.2024.10798306.
M. F. Abdollah et al., "Optimized PID controller for quarter-car active suspension system under various road profiles," Mod. Appl. Sci., vol. 18, no. 1, p. 22, 2024, https://doi.org/10.5539/mas.v18n1p22.
Z. Boulaaras, A. Aouiche, and K. Chafaa, "Intelligent FOPID and LQR control for adaptive a quarter vehicle suspension system," Eur. J. Electr. Eng., vol. 25, no. 1–6, pp. 1–8, 2023, https://doi.org/10.18280/ejee.251-601.
A. J. Abougarair, H. Almgallesh and N. A. A. Shashoa, "Dynamics and Optimal Control of Quadcopter," 2024 IEEE 4th International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), pp. 136-141, 2024, https://doi.org/10.1109/MI-STA61267.2024.10599742.
A. Abougarair, “Robust control and optimized parallel control double loop design for mobile robot,” IAES Int. J. Robot. Autom. (IJRA), vol. 9, no. 3, 2020, https://doi.org/10.11591/ijra.v9i3.pp160-170.
A. J. Abougarair and N. A. A. Shashoa, "Integrated Controller Design for Underactuated Nonlinear System," 2022 Second International Conference on Power, Control and Computing Technologies (ICPC2T), pp. 1-6, 2022, https://doi.org/10.1109/ICPC2T53885.2022.9776984.
O. Mrehel, et al., “Optimizing cancer treatment using optimal control theory,” AIMS Mathematics, vol 9, no. 11, pp. 31740-31769, 2024, https://doi.org/10.3934/math.20241526.
F. Qidi et al., “Linear quadratic optimal control with the finite state for suspension system,” Machines, vol. 11, no. 2, p. 127, 2023, https://doi.org/10.3390/machines11020127.
R. Yildiz, “A novel particle swarm optimization approach for product design and manufacturing,” Int. J. Adv. Manuf. Technol., vol. 40, no. 5, pp. 617–628, 2009, https://doi.org/10.1007/s00170-008-1453-1.
D. Rini et al., “Particle swarm optimization: technique, system and challenges,” Int. J. Comput. Appl., vol. 14, no. 1, pp. 19–26, 2011, https://doi.org/10.5120/ijais-3651.
S. Shaobin, C. Guoqiang, and D. Jun, “Active suspension control based on particle swarm optimization,” Recent Pat. Mech. Eng., vol. 13, no. 1, pp. 60–78, 2020, https://doi.org/10.2174/2212797612666191118123838.
W. Zhao and L. Gu, "Hybrid particle swarm optimization genetic LQR controller for active suspension," Appl. Sci., vol. 13, no. 14, 2023, https://doi.org/10.3390/app13148204.
J. Zhang, F. Long, J. Lin, and X. Zhu, "Particle swarm optimized fuzzy proportional-integral-derivative controller-based transverse leaf spring active suspension for vibration control," J. Low Freq. Noise Vib. Act. Control, vol. 43, no. 2, 2023, https://doi.org/10.1177/14613484231221953.
R. Saleh, "A comparative study of particle swarm optimized control techniques for active suspension system," Int. Rev. Autom. Control, vol. 15, no. 4, p. 213, 2022, https://doi.org/10.15866/ireaco.v15i4.22430.
J. Hurel, J. Amaya, J. J. Elvira Peralta, D. Alvarado, and F. Flores, "Particle swarm optimization applied on fuzzy control: Comparative analysis for a quarter-car active suspension model," in 2022 IEEE Int. Conf. Ind. Technol. (ICIT), pp. 1–8, 2022, https://doi.org/10.1109/ICIT48603.2022.10002809.
Q. Zhao and B. Zhu, "Multi-objective optimization of active suspension predictive control based on improved PSO algorithm," J. Vibroeng., vol. 21, no. 5, pp. 1388–1404, 2019, https://doi.org/10.21595/jve.2018.19580.
S. Lv, G. Chen, and J. Dai, "Active suspension control based on particle swarm optimization," Recent Pat. Mech. Eng., vol. 13, no. 1, pp. 60–78, 2020, https://doi.org/10.2174/2212797612666191118123838.
L. Tang, N. Luo Ren, and S. Funkhouser, "Semi-active suspension control with PSO tuned LQR controller based on MR damper," Int. J. Automot. Mech. Eng., vol. 20, no. 2, pp. 10512-10522, 2023, https://doi.org/10.15282/ijame.20.2.2023.13.0811.
T. Abut and E. Salkim, "Control of quarter-car active suspension system based on optimized fuzzy linear quadratic regulator control method," Appl. Sci., vol. 13, no. 15, 2023, https://doi.org/10.3390/app13158802.
M. S. Soudani, A. Aouiche, M. Ghanai, and K. Chafaa, "Advanced active suspension control: A three-input fuzzy logic approach with jerk feedback for enhanced performance and robustness," Measurement, vol. 229, p. 114326, 2024, https://doi.org/10.1016/j.measurement.2024.114326.
G. I. Y. Mustafa and H. Wang, "A new adaptive fuzzy logic control for nonlinear car active suspension systems based on the time-delay," J. Vib. Control, p. 10775463241281395, 2024, https://doi.org/10.1177/10775463241281395.
M. Li, J. Li, G. Li, and J. Xu, "Analysis of active suspension control based on improved fuzzy neural network PID," World Electr. Veh. J., vol. 13, no. 12, p. 226, 2022, https://doi.org/10.3390/wevj13120226.
M. Edardar et al., “Adaptive neural networks based robust output feedback controllers for nonlinear systems,” Int. J. Robot. Control Syst., vol. 2, no. 1, pp. 37–56, 2022, https://doi.org/10.31763/ijrcs.v2i1.523.
J. Zhang and Y. Li, "Adaptive Fuzzy Control for Active Suspension Systems with Stochastic Disturbance and Full State Constraints," 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI), pp. 380-385, 2020, https://doi.org/10.1109/CVCI51460.2020.9338500.
A. Alfadhli and J. Darling, “The control of an active seat suspension using an optimized fuzzy logic controller based on preview information from a full vehicle model,” Vibration, vol. 1, no. 1, pp. 20–40, 2018, https://doi.org/10.3390/vibration1010003.
A. Abougarair, “Neural Networks Identification and Control of Mobile Robot Using Adaptive Neuro Fuzzy Inference System”, In Proceedings of the 6th International Conference on Engineering & MIS 2020, pp. 1-9, 2020, https://doi.org/10.1145/3410352.3410734.
T. D. Tolossa et al. “Trajectory tracking control of a mobile robot using fuzzy logic controller with optimal parameters,” Robotica, vol. 42, no. 8, pp. 2801-2824, 2024, https://doi.org/10.1017/S0263574724001140.
I. Buzkhar, “Modeling and Control of a Two-Wheeled Robot Machine with a Handling Mechanism,” 2023 IEEE 3rd International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA2023), pp. 193-199, 2023, https://doi.org/10.1109/MI-STA57575.2023.10169424.
A. Oun et al., “Cancer treatment precision strategies through optimal control theory,” Journal of Robotics and Control (JRC), vol. 5, no. 5, pp. 1261-1290, 2024, https://doi.org/10.18196/jrc.v5i5.22378.
A. Abougarair, “Optimal Control Synthesis of Epidemic Model,” The International Journal of Engineering & Information Technology (IJEIT), vol. 10, no. 1, 2022, https://doi.org/10.36602/ijeit.v10i1.62.
M. B. Swedan, A. J. Abougarair and A. S. Emhemmed, "Stabilizing of Quadcopter Flight Model," 2023 IEEE 3rd International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), pp. 254-260, 2023, https://doi.org/10.1109/MI-STA57575.2023.10169604.
M. Almograbi et al., Model Predictive Control for Stabilizing Quadcopter Flight and Following Trajectories, The International Journal of Engineering & Information Technology (IJEIT), vol. 13, issue 2, pp. 14-25, 2025, https://doi.org/10.36602/ijeit.v13i2.562.
A. Abougarair, A. Oun and A. Emhemmed, "Intelligent Control Design for Linear Model of Active Suspension System," 2018 30th International Conference on Microelectronics (ICM), pp. 17-20, 2018, https://doi.org/10.1109/ICM.2018.8703995.
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Ahmed Abougarair, Mohamed Aburakhis, Mohsen Bakouri, Alfian Ma’arif

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

