Dependability of the Explorer Autonomous Underwater Vehicle in Oil Plume Response Mission; Case Study of the Vehicle Roll Control
DOI:
https://doi.org/10.12928/biste.v6i1.9906Keywords:
Dependability, Unmanned Underwater Vehicle, Roll Control, Marine Environment, Digital Mission, Minimal Cut SetAbstract
Oil plume dispersion in water depth is an applied topic to study, and a practical way to respond to such a catastrophic event is to deploy an autonomous underwater vehicle (AUV) in the area. With notice that the underwater oil flows upward to the surface and in the meantime disperses into larger radii, a conical helix can be a suitable candidate for maneuvering about the oil spill.
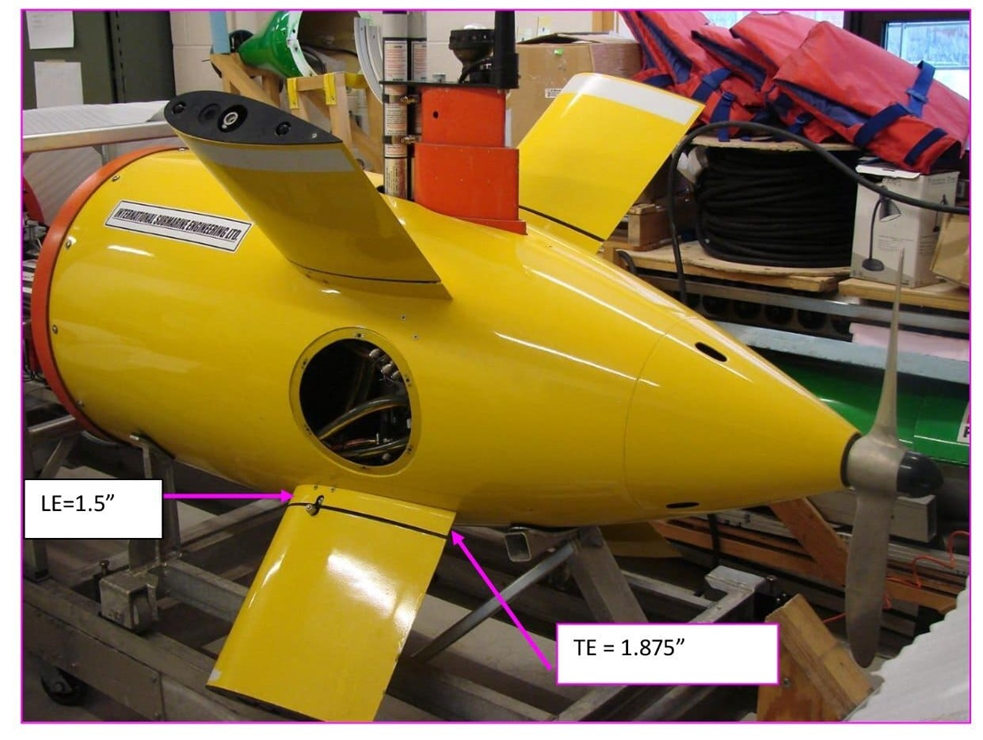
A helix maneuver requires steady control of the roll angle of the vehicle. Therefore, roll control adverse yaw, which originated in aviation, would be a concern for underwater navigation too. The correcting actuator signal that can adjust the vehicle's yaw angle, and therefore maintain its heading angle, shall be provided by the rudders or stern planes of the vehicle. Then the methodology of this research is to analyze the dependability of the rudder’s subsystem as a network of components in series. The dependability analysis that is performed here is in a series block diagram that is based on a minimal cut series. The results of this study show that the dependability of the engineering subsystems in an unmanned underwater vehicle can directly influence the outcome of a sensitive marine environmental protection project. Results show that the stern planes by more than a 90 percent chance can manage to control the maneuvering goals.
References
ISO, “ISO/AWI 20682 Autonomous Underwater Vehicles Risk and Reliability,” 01 06 2023. [Online]. Available: https://www.iso.org/standard/86398.html. [Accessed 03 02 2024].
M. P. Brito dan G. Griffiths, “A Markov chain state transition approach to establishing critical phases for AUV reliability,” IEEE Journal of Oceanic Engineering, vol. 36, no. 1, pp. 139-149, 2011, https://doi.org/10.1109/JOE.2010.2083070.
M. Allocco, Safety analyses of complex systems: considerations of software, firmware, hardware, human, and the environment, Hoboken, New Jersey: Willey, 2010.
ISO 23460, Space projects — Programme management — Dependability assurance requirements, GENEVA: ISO, 2011.
C. Thieme, Development of a Risk Management Process for NTNU's REMUS 100 AUV, Trondheim, Norway: Norwegian University of Science and Technology, 2014.
M. P. Brito dan G. Griffiths, “Updating Autonomous Underwater Vehicle Risk Based on the Effectiveness of Failure Prevention and Correction,” JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY, vol. 35, pp. 797-808, 2018, https://doi.org/10.1175/JTECH-D-16-0252.1.
F. Maurelli, S. Krupinski, X. Xiang dan Y. Petillot, “AUV localisation: a review of passive and active techniques,” International Journal of Intelligent Robotics and Applications, vol. 6, pp. 246-269, 2022, https://doi.org/10.1007/s41315-021-00215-x.
H.-D. Kochs, System Dependability Evaluation Including S-dependency and Uncertainty: Model-Driven Dependability Analyses, Cham, Switzerland: Springer International Publishing AG, 2018, https://doi.org/10.1007/978-3-319-64991-7.
X. Chen, N. Bose, M. Brito, F. Khan, B. Thanyamanta dan T. Zou, “A review of risk analysis research for the operations of autonomous underwater vehicles,” Reliability Engineering and Systems Safety, vol. 216, pp. 1-17, 2021, https://doi.org/10.1016/j.ress.2021.108011.
P. Koopman, “A User’s Guide to Vehicle Automation Modes,” 28 01 2021. [Online]. Available: https://edgecaseresearch.medium.com/a-users-guide-to-vehicle-automation-modes-4bdd49b30dc0. [Accessed 30 05 2023].
M. Gad-el-Hak, “Coherent structures and flow control: genesis and prospect,” BULLETIN OF THE POLISH ACADEMY OF SCIENCES, vol. 67, no. 3, pp. 411-444, 2019, https://doi.org/10.24425/bpasts.2019.129644.
D. Mercado, M. Maia dan F. J. Diez, “Aerial-Underwater Systems, a New Paradigm in Unmanned Vehicles,” Journal of Intelligent & Robotic Systems, pp. 1-10, 2018, https://doi.org/10.1007/s10846-018-0820-x.
A. Dawson, P. Graziani dan E. Miller, Interviewees, All things Ansys- PADT podcast: Episode 83. [Interview]. March 2020.
J. Hwang, N. Bose, H. Nguyen dan G. Williams, “Oil plume mapping: Adaptive Tracking and adaptive sampling from an autonomous underwater vehicle,” IEEE Access, vol. 8, pp. 198021-198034, 2020, https://doi.org/10.1109/ACCESS.2020.3032161.
N. Bose, “Canadian Academy of Engineering Oceans Seminar,” Canadian Academy of Engineering, St. John's, 2021.
M. T. Issac, Analysis of Full-Scale Sea-Trials Manoeuvring Data and Development and Validation of a Motion-Simulation Model for the AUV "MUN Explorer", St. John's: Memorial University of Newfoundland, 2011.
MUN, “Memorial University of Newfoundland and Labrador,” 2023. [Online]. Available: https://www.mun.ca/engineering/research/centres-and-facilities/research-centres/oerc/facilities/merlin/explorer-auv/. [Accessed 16 11 2023].
R. Lewis, N. Bose, S. Lewis, P. King, D. Walker, R. Devillers, N. Ridgley, T. Husain, J. Munroe dan A. Vardy, “MERLIN - A decade of large AUV experience at Memorial University of Newfoundland,” dalam IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, 2016, https://doi.org/10.1109/AUV.2016.7778675.
C. D. Williams, “Email communications,” NRC Canada, St. John's, 2009.
Explorer, “Holyrood sea trials,” Azarsina, Farhood, St. John's, 2023.
F. Azarsina, Experimental Hydrodynamics and Simulation of Manoeuvring of an Axisymmetric Underwater Vehicle, St. John's: Memorial University, 2009.
ROLL RATE CONTROL APPLICATION: RollControl SCADE Model, 2024.
J. Hwang, N. Bose, G. Millar, C. Bulger dan G. Nazareth, “Bubble Plume Tracking Using a Backseat Driver on an Autonomous Underwater Vehicle,” Drones, vol. 7, pp. 1-21, 2023, https://doi.org/10.3390/drones7100635.
B.-Y. Raanan, J. Bellingham, Y. Zhang, M. Kemp, B. Kieft, H. Singh dan Y. Girdhar, “Detection of unanticipated faults for autonomous underwater vehicles using online topic models,” Journal of Field Robotics, pp. 705-716, 2017, https://doi.org/10.1002/rob.21771.
C. I. Sprague, Ö. Özkahraman, A. Munafo, R. Marlow, A. Phillips and P. Ögren, "Improving the Modularity of AUV Control Systems using Behaviour Trees," 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), pp. 1-6, 2018, https://doi.org/10.1109/AUV.2018.8729810.
R. Lewis, “Email communication,” Memorial University, St. John's, 2024.
J. Evans dan D. Lane, “Distributed hardware-in-the-loop simulation for unmanned underwater vehicle development—issues and applications,” dalam Technology And Applications of Autonomous Underwater Vehicles, pp. 1-18, 2003, https://doi.org/10.1201/9780203522301.ch1.
H.-D. Kochs, Dependability of Engineering Systems: A Markov Minimal Cut Approach, Cham, Switzerland: Springer , 2020, https://doi.org/10.1007/978-3-030-38327-5.
L. V. Kiselev, A. V. Bagnitckii dan A. V. Medvedev, “Identification of AUV Hydrodynamic Characteristics Using Model and Experimental Data,” Gyroscopy and Navigation, vol. 8, no. 3, pp. 78-92, 2017, https://doi.org/10.1134/S2075108717030051.
D. Scourzic, “Alistar AUV on track for inspection trials in the Gulf of Mexico,” Offshore Magazine, [Online], p. 01, April 2006.
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Farhood Azarsina

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

