RoboVR: A Digital Twin Based Framework for Low-Cost 4DoF Robotic Arm Control
DOI:
https://doi.org/10.12928/biste.v7i4.14703Keywords:
Digital Twin, Robotic Arm 4-DoF, Framework, Virtual Reality (VR), Low-Cost Robotic ArmAbstract
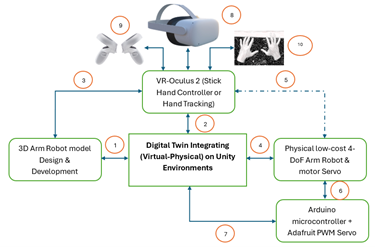
The growing need for remote operation in risky situations has encouraged the use of robots that can be controlled from virtual environments. Integrating digital twin and virtual reality offers a way to monitor and control physical systems in three dimensional space. However, many existing implementations still depend on expensive robotic hardware and closed-loop control, while digital twin and virtual reality in open-loop mode is rarely reported and still faces the lack of feedback and the risk of mismatch between virtual motion and physical motion.This study proposes an experimental digital twin and virtual reality framework built on lightweight hardware to control a 4-DoF robotic arm using Arduino and PCA9685, with Unity acting both as the digital twin environment and as the source of kinematic commands. Method covers integration design, calibration of Unity angle to PWM mapping, execution on servos, and preparation of data to compare virtual joint angles with measured servo angles. Testing and validation were carried out through stepwise rotation of the ‘Base’, ‘Shoulder’, ‘Elbow’, and ‘End-effector’ joints to evaluate how well the physical motion followed the virtual model. Results show that the right and left ‘Base’ joints achieved small mean errors of -1.60 and 1.8 degrees, with variance of 1.35 and 1.62. The ‘Elbow-down’ motion was also accurate with a mean error of 1.43 degrees and a variance of 0.98. The largest deviation occurred in the ‘Shoulder’ joint, at -10.67 and 26.5 degrees. These findings confirm that open-loop digital twin and virtual reality control is feasible for low-cost platforms.
References
T. Luu et al., “Enhancing real-time robot teleoperation with immersive virtual reality in industrial IoT networks,” International Journal of Advanced Manufacturing Technology, vol. 139, pp. 6233–6257, 2025, https://doi.org/10.1007/s00170-025-16236-w.
F. Nenna et al., “The virtualization of human–robot interactions: a user-centric workload assessment,” Virtual Reality, vol. 27, pp. 553–571, 2023, https://doi.org/10.1007/s10055-022-00667-x.
J. Audonnet, F. Bénard, and C. Marchand, “IMMERTWIN: An immersive digital twin framework for robotic teleoperation,” in Proc. IEEE Int. Conf. on Virtual Reality and Augmented Reality (VRAR), pp. 101–110, 2024, https://doi.org/10.48550/arXiv.2409.08964.
F. P. Audonnet, J. Grizou, A. Hamilton, and G. Aragon-Camarasa, “TELESIM: A modular and plug-and-play framework for robotic arm teleoperation using a digital twin,” in Proc. 2024 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 17770–17777, 2024, https://doi.org/10.1109/ICRA57147.2024.10610935.
J. S. Artal-Sevil, A. Acón, J. L. Montañés, and J. A. Domínguez, “Design of a low-cost robotic arm controlled by surface EMG sensors,” in Proc. 2018 XIII Technologies Applied to Electronics Teaching Conf. (TAEE), pp. 1–8, 2018, https://doi.org/10.1109/TAEE.2018.8476126.
E. Iadanza et al., “A robotic arm for safe and accurate control of biomedical equipment during COVID-19,” Health Technology, vol. 13, pp. 285–300, 2023, https://doi.org/10.1007/s12553-022-00715-1.
H. M. Ali, Y. Hashim, and G. A. Al-Sakkal, “Design and implementation of Arduino based robotic arm,” International Journal of Electrical and Computer Engineering (IJECE), vol. 12, no. 2, pp. 1411–1418, 2022, https://doi.org/10.11591/ijece.v12i2.pp1411-1418.
S. Otto and R. Seifried, “Open-loop control of underactuated mechanical systems using servo-constraints: analysis and some examples,” in Lecture Notes in Applied and Computational Mechanics, pp. 81–122, 2018, https://doi.org/10.1007/11221_2018_4.
D. Bui, W. Li, and H. Huang, “CarGameAR: An integrated AR car game authoring interface for custom built car programed on Arduino board,” In Proceedings of the 2023 7th International Conference on Graphics and Signal Processing, pp. 62-66, 2023, https://doi.org/10.48550/arXiv.2305.00084.
P. Badoniya and J. George, “Two link planar robot manipulator mechanism analysis with MATLAB,” International Journal for Research in Applied Science & Engineering Technology (IJRASET), vol. 6, no. 7, 2018, https://doi.org/10.22214/ijraset.2018.7132.
T. O. Hodson, “Root-mean-square error (RMSE) or mean absolute error (MAE): when to use them or not,” Geoscientific Model Development, vol. 15, pp. 5481–5487, 2022, https://doi.org/10.5194/gmd-15-5481-2022.
N. Dunbar. Arduino Language Reference. in Arduino Software Internals. Berkeley, CA: Apress, 2020, https://doi.org/10.1007/978-1-4842-5790-6_3.
E. Kučera, O. Haffner, and Š. Kozák, “Connection between 3D engine Unity and microcontroller Arduino: a virtual smart house,” in 2018 Cybernetics & Informatics (K&I), pp. 1–8, 2018, https://doi.org/10.1109/CYBERI.2018.8337531.
M. Muladi, S. Sendari, and I. A. E. Zaini, “Colour-based object sorting in a wide range and dense target points using arm robot,” in Proc. 2nd Int. Conf. Vocational Education and Training (ICOVET 2018), pp. 132–138, 2019, https://doi.org/10.2991/icovet-18.2019.33.
A. Mazumder, et al., “Towards next generation digital twin in robotics: trends, scopes, challenges, and future,” Heliyon, vol. 9, no. 2, p. e13359, 2023, https://doi.org/10.1016/j.heliyon.2023.e13359.
E. Zio and L. Miqueles, “Digital twins in safety analysis, risk assessment and emergency management,” Reliability Engineering & System Safety, vol. 246, p. 110040, 2024, https://doi.org/10.1016/j.ress.2024.110040.
J. K. Touckia, “Integrating the digital twin concept into the evaluation of reconfigurable manufacturing systems (RMS): literature review and research trend,” International Journal of Advanced Manufacturing Technology, vol. 126, pp. 875–889, 2023, https://doi.org/10.1007/s00170-023-10902-7.
G. Buckingham, et al., “Hand tracking for immersive virtual reality: opportunities and challenges,” Frontiers in Virtual Reality, vol. 2, 2021, https://doi.org/10.3389/frvir.2021.728461.
L. Guo, Z. Lu and L. Yao, "Human-Machine Interaction Sensing Technology Based on Hand Gesture Recognition: A Review," in IEEE Transactions on Human-Machine Systems, vol. 51, no. 4, pp. 300-309, 2021, https://doi.org/10.1109/THMS.2021.3086003.
D. Borzelli, et al., “A quantitative assessment of the hand kinematic features using Oculus Quest 2,” Scientific Reports, vol. 15, no. 1, p. 8842, 2025, https://doi.org/10.1038/s41598-025-91552-5.
D. J. Wagg, C. Burr, J. Shepherd, Z. Xuereb Conti, M. Enzer, and S. Niederer, “The philosophical foundations of digital twinning,” Data-Centric Engineering, vol. 6, 2025, https://doi.org/10.1017/dce.2025.4.
T. C. Callari, R. Vecellio Segate, E. M. Hubbard, A. Daly, and N. Lohse, “An ethical framework for human–robot collaboration for the future people-centric manufacturing,” Technology in Society, vol. 78, 102680, 2024, https://doi.org/10.1016/j.techsoc.2024.102680.
R. Etemad-Sajadi, A. Soussan, and T. Schöpfer, “How ethical issues raised by human–robot interaction influence intention to use,” International Journal of Social Robotics, vol. 14, no. 4, pp. 1103-1115, 2022, https://doi.org/10.1007/s12369-021-00857-8.
H. C. Ukwuoma, G. Dusserre, G. Coatrieux, and J. Vincent, “Analysis of digital twin and its physical object: exploring the efficiency and accuracy of datasets for real-world application,” Data Science and Management, vol. 7, no. 4, pp. 361–375, 2024, https://doi.org/10.1016/j.dsm.2024.04.002.
M. Sakhineti and S. Jayabalan, “Design and fabrication of SHRALA: social humanoid robot based on autonomous learning algorithm,” Procedia Computer Science, vol. 171, pp. 2050–2056, 2020, https://doi.org/10.1016/j.procs.2020.04.220.
M. Eslami, M. Pirmoradian, A. Mokhtarian, and S. Baghaei, “Design and manufacture of a soft robot with dual-interaction in virtual reality,” Heliyon, vol. 9, no. 9, p. e19997, 2023, https://doi.org/10.1016/j.heliyon.2023.e19997.
P. V. F. Zawadniak, L. Piardi, T. Brito, et al., “Micromouse 3D simulator with dynamics capability: a Unity environment approach,” SN Applied Sciences, vol. 3, p. 259, 2021, https://doi.org/10.1007/s42452-021-04239-7.
B. Estrany, C. Marin, M. Mascaró, et al., “Multimodal human–machine interface devices in the cloud,” Journal on Multimodal User Interfaces, vol. 12, pp. 125–143, 2018, https://doi.org/10.1007/s12193-017-0253-z.
F. D. Von Borstel, M. S. Haro, J. F. Villa-Medina, et al., “Propulsive element normal force based on acceleration measurements experienced by a subcarangiform robotic fish,” Journal of Intelligent & Robotic Systems, vol. 104, p. 73, 2022, https://doi.org/10.1007/s10846-022-01600-9.
G. W. Wiriasto, R. Misbahuddin, A. S. Rachman, I. L. Harahap, L. S. I. Akbar, M. S. Iqbal, and M. Fikriansyah, “Study on the development of a virtual reality application for skeletal anatomy learning using rapid application development (RAD),” Jurnal Penelitian Pendidikan IPA, vol. 10, no. 8, pp. 5726–5733, 2024, https://doi.org/10.29303/jppipa.v10i8.8722.
L. Clark, M. E. Iskandarani, and S. Riggs, “Reaching interactions in virtual reality: the effect of movement direction, hand dominance, and hemispace on the kinematic properties of inward and outward reaches,” Virtual Reality, vol. 28, p. 43, 2024, https://doi.org/10.1007/s10055-023-00930-9.
H. Abe et al., “Combining AR and input device to control remotely a robot arm,” Human-Intelligent Systems Integration, pp. 1-14, 2025, https://doi.org/10.1007/s42454-025-00076-w.
G. Maculotti et al., “Traceable digital twin for accurate positioning of industrial robot arms in human–robot collaborative systems,” Flexible Services and Manufacturing Journal, pp. 1-37, 2025, https://doi.org/10.1007/s10696-025-09632-7.
R. F. Pitzalis et al., “Application of augmented reality-based digital twin approaches: a case study to industrial equipment,” International Journal of Advanced Manufacturing Technology, vol. 138, pp. 3747–3763, 2025, https://doi.org/10.1007/s00170-025-15755-w.
I. D. Ortiz and O. A. Vivas, “Virtual reality platform for Cartesian manipulation of digital twin in a UR3 robot,” Ingeniería y Competitividad, vol. 27, no. 1, 2025, https://doi.org/10.25100/iyc.v27i1.14418.
Y. Cen, J. Deng, Y. Chen, H. Liu, Z. Zhong, B. Fan, L. Chang, and L. Jiang, “Digital twin-empowered robotic arm control: an integrated PPO and fuzzy PID approach,” Mathematics, vol. 13, no. 2, p. 216, 2025, https://doi.org/10.3390/math13020216.
A. K. Ali, “A comprehensive framework for integrating robotics and digital twins in façade perforation,” ARO, vol. 12, no. 1, pp. 191–202, 2024, https://doi.org/10.14500/aro.11351.
F. Mo et al., “Digital twin-based self-learning decision-making framework for industrial robots in manufacturing,” International Journal of Advanced Manufacturing Technology, vol. 139, pp. 221–240, 2025, https://doi.org/10.1007/s00170-025-15844-w.
J.-S. Shaw and Y.-H. Huang, “Virtual modeling of an industrial robotic arm for energy consumption estimation,” Advances in Technology and Innovation, vol. 8, no. 4, pp. 267–277, 2023, https://doi.org/10.46604/aiti.2023.11957.
P. Chotikunnan, et al., “Enhancing MG996R servo motor performance using PSO-tuned PID and feedforward control,” International Journal of Robotics and Control Systems, vol. 5, no. 2, pp. 1120–1138, 2025, https://doi.org/10.31763/ijrcs.v5i2.1854.
D. Sun, A. Kiselev, Q. Liao, T. Stoyanov, and A. Loutfi, “A new mixed-reality-based teleoperation system for telepresence and maneuverability enhancement,” IEEE Transactions on Human-Machine Systems, vol. 50, no. 1, pp. 55–67, 2020, https://doi.org/10.1109/THMS.2019.2960676.
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Giri Wahyu Wiriasto, Siti Sendari, Dyah Lestari, Muhamad Syamsu Iqbal, Norrima Mochtar

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

