Optimal PID Controller Based on Different Modified Grasshopper Optimization Algorithm for Nonlinear Single-Input Single-Output System
DOI:
https://doi.org/10.12928/biste.v7i4.14394Keywords:
PID Controller, Dynamically Attraction-Repulsion Grasshopper Optimization Algorithm, Nonlinear Mass-Spring Damper, Lévy Flight and Chaotic Grasshopper Optimization Algorithm, Benchmark Functions CEC2017, Linear And Nonlinear Desired InputsAbstract
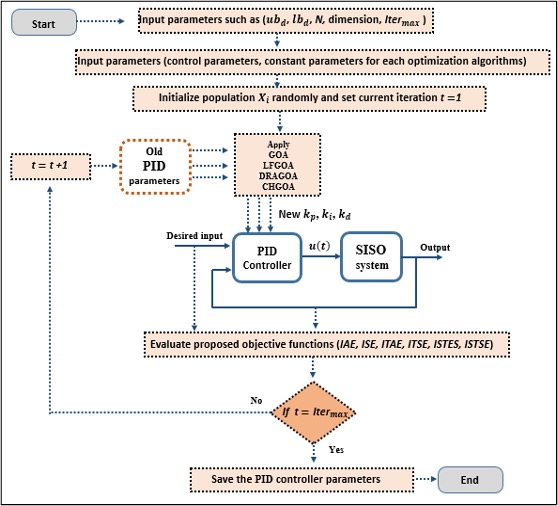
This paper presents a comparative study of the Grasshopper Optimization Algorithm (GOA) with three suggested modified versions—Levy Flight GOA (LFGOA), Dynamic Attraction-Repulsion GOA (DARGOA), and Chaotic GOA (CHGOA)—for tuning Proportional-Integral-Derivative (PID) controller parameters in a nonlinear Single-Input Single-Output (SISO) system. The research contribution is the development and evaluation of CHGOA, which aims to improve convergence speed and transient response stability. The methodology employs exploratory and exploitative mechanisms of each algorithm to optimize PID parameters based on six objective functions. Performance metrics include rise time, settling time, overshoot, peak value, and best fitness obtained from MATLAB/Simulink simulations. A second-order Mass-Spring-Damper (MSD) system is used as a representative nonlinear SISO system. Simulation results indicate that the proposed CHGOA consistently achieves lower fitness values, faster convergence, and stable transient responses compared to LFGOA, DARGOA, and standard GOA, under the tested objective functions. While LFGOA and DARGOA show competitive performance in traditional error metrics, standard GOA exhibits slower convergence in simulation scenarios. In this paper, the performance of the MSD system controlled by the proposed optimal PID with GOAs was also compared with the performance of this system with Nonlinear PIDs (NPIDs) which proposed by previous studies. The comparison results showed the efficiency of our proposed controllers in improving the performance of the MSD system, especially the CHGOA. Overall, the proposed CHGOA provides an effective balance between error minimization, convergence speed, and transient response performance, making it suitable for high-precision real-time applications.
References
H. Yu, Z. Hou and X. Yu, "A Controller-Dynamic-Linearization-Based Model Predictive Control Approach for SISO Discrete-time Nonlinear Systems," 2019 12th Asian Control Conference (ASCC), pp. 1054-1059, 2019, https://ieeexplore.ieee.org/abstract/document/8765146.
H. Boumaza and K. Belarbi, “Optimal model predictive control solution approximation using Takagi Sugeno for linear and a class of nonlinear systems,” Int. J. Dyn. Control, vol. 10, no. 4, pp. 1265–1278, 2022, https://doi.org/10.1007/s40435-021-00875-4.
Z. Wang and R. M. Jungers, “Immersion-based model predictive control of constrained nonlinear systems: Polyflow approximation,” 2021 Eur. Control Conf. ECC 2021, no. 0, pp. 1099–1104, 2021, https://doi.org/10.23919/ECC54610.2021.9655233.
D. R. Raghavendra, “Control of SISO EH Servo Systems,” in Electrohydraulic Servo Systems: Applications, Design and Control, pp. 111–171, 2023, https://doi.org/10.1007/978-981-19-8065-7_5.
P. Razzaghi, E. Al Khatib, and Y. Hurmuzlu, “Robust Quadratic Gaussian Control of Continuous-time Nonlinear Systems,” arXiv preprint arXiv:1912.06717, 2019, https://doi.org/10.48550/arXiv.1912.06717.
B. N. Getu, “Modelling and Analysis of a Nonlinear System using Simulink,” in 2019 International Conference on Electrical and Computing Technologies and Applications (ICECTA), pp. 1–4, 2019, https://doi.org/10.1109/ICECTA48151.2019.8959725.
A. Lozynskyy, L. Kasha, S. Pakizh, and R. Sadovskyi, “Synthesis of PI- and PID-Regulators in Control Systems Derived by the Feedback Linearization Method,” Energy Eng. Control Syst., vol. 10, no. 2, pp. 120–130, 2024, https://doi.org/10.23939/jeecs2024.02.120.
E. H. Karam, N. A. Al-Awad, and N. S. Abdul-Jaleel, “Design nonlinear model reference with fuzzy controller for nonlinear SISO second order systems,” Int. J. Electr. Comput. Eng., vol. 9, no. 4, pp. 2491–2502, 2019, https://doi.org/10.11591/ijece.v9i4.pp2491-2402.
F. Zhang, J. Hua, and Y. Li, “Indirect Adaptive Fuzzy Control of SISO Nonlinear Systems With Input–Output Nonlinear Relationship,” IEEE Trans. Fuzzy Syst., vol. 26, no. 5, pp. 2699–2708, 2018, https://doi.org/10.1109/TFUZZ.2018.2800714.
S. Chen, W. Huang, and Q. Liu, “A New Adaptive Robust Sliding Mode Control Approach for Nonlinear Singular Fractional-Order Systems,” Fractal Fract., vol. 6, no. 5, pp. 1–19, 2022, https://doi.org/10.3390/fractalfract6050253.
B. Li, J. Zhu, R. Zhou, and G. Wen, “Adaptive Neural Network Sliding Mode Control for a Class of SISO Nonlinear Systems,” Mathematics, vol. 10, no. 7, pp. 1–12, 2022, https://doi.org/10.3390/math10071182.
C. Yue, H. Chen, L. Qian, and J. Kong, “Adaptive sliding-mode tracking control for an uncertain nonlinear SISO servo system with a disturbance observer,” J. Shanghai Jiaotong Univ., vol. 23, no. 3, pp. 376–383, 2018, https://doi.org/10.1007/s12204-018-1953-6.
P. Kumar, S. Nema, and P. K. Padhy, “PID controller for nonlinear system using cuckoo optimization,” 2014 Int. Conf. Control. Instrumentation, Commun. Comput. Technol. ICCICCT 2014, pp. 711–716, 2014, https://doi.org/10.1109/ICCICCT.2014.6993052.
H. I. Ali, H. M. Jassim, and A. F. Hasan, “Optimal Nonlinear Model Reference Controller Design for Ball and Plate System,” Arab. J. Sci. Eng., vol. 44, no. 8, pp. 6757–6768, 2019, https://doi.org/10.1007/s13369-018-3616-1.
J. Cheng and Y. Xiong, “Multi-strategy adaptive cuckoo search algorithm for numerical optimization,” Artif. Intell. Rev., vol. 56, no. 3, pp. 2031–2055, 2023, https://doi.org/10.1007/s10462-022-10222-4.
L. Velasco, H. Guerrero, and A. Hospitaler, “A Literature Review and Critical Analysis of Metaheuristics Recently Developed,” Arch. Comput. Methods Eng., vol. 31, no. 1, pp. 125–146, 2024, https://doi.org/10.1007/s11831-023-09975-0.
E. H. Houssein, M. K. Saeed, G. Hu, and M. M. Al-Sayed, Metaheuristics for Solving Global and Engineering Optimization Problems: Review, Applications, Open Issues and Challenges, vol. 31, no. 8, 2024. https://doi.org/10.1007/s11831-024-10168-6.
V. Srivastava, S. Srivastava, G. Chaudhary, and X. P. Blanco Valencia, “Performance improvement and Lyapunov stability analysis of nonlinear systems using hybrid optimization techniques,” Expert Syst., vol. 41, no. 6, p. e13140, 2024, https://doi.org/10.1111/exsy.13140.
V. Kaliappan, “Nonlinear PID controller parameter optimization using enhanced genetic algorithm for nonlinear control system,” J. Control Eng. Appl. Informatics, vol. 18, no. 2, pp. 3–10, 2016, https://ceai.srait.ro/index.php?journal=ceai&page=article&op=view&path%5B%5D=2891&path%5B%5D=0.
Z. Chu, Q. Guo, and C. Wang, “The PID Control Algorithm based on Whale Optimization Algorithm Optimized BP Neural Network,” in 2023 IEEE 7th Information Technology and Mechatronics Engineering Conference (ITOEC), vol. 7, pp. 2450–2453, 2023, https://doi.org/10.1109/ITOEC57671.2023.10291531.
D. Nasri and D. Mokeddem, “Optimisation of multi-objective problems using an efficient Levy flight grasshopper algorithm,” Int. J. High Perform. Syst. Archit., vol. 11, no. 1, pp. 26–35, 2022, https://doi.org/10.1504/IJHPSA.2022.121901.
L. Wu, J. Wu, and T. Wang, “Enhancing grasshopper optimization algorithm (GOA) with levy flight for engineering applications,” Scientific reports, vol. 13, no. 1, 2023. https://doi.org/10.1038/s41598-022-27144-4.
Y. Zou, B. Xiao, J. Qian, and Z. Xiao, “Design of Intelligent Nonlinear H2/H∞ Robust Control Strategy of Diesel Generator-Based CPSOGSA Optimization Algorithm,” Processes, vol. 11, no. 7, pp. 1–28, 2023, https://doi.org/10.3390/pr11071867.
Y. Deng, W. Song, S. Yin, M. Zhong, K. Yang and X. Feng, "A Model Predictive Control Scheme Without Current Sensor of Dual Active Bridge DC–DC Converters: Improving Dynamic Performance and Reducing Hardware Cost," in IEEE Transactions on Transportation Electrification, vol. 9, no. 2, pp. 2916-2928, 2023, https://doi.org/10.1109/TTE.2022.3229076.
S. Saremi, S. Mirjalili, and A. Lewis, “Grasshopper Optimisation Algorithm: Theory and application,” Adv. Eng. Softw., vol. 105, pp. 30–47, 2017, https://doi.org/10.1016/j.advengsoft.2017.01.004.
A. A. Ewees, M. A. Elaziz, Z. Alameer, H. Ye, and Z. Jianhua, “Improving multilayer perceptron neural network using chaotic grasshopper optimization algorithm to forecast iron ore price volatility,” Resour. Policy, vol. 65, p. 101555, 2020, https://doi.org/10.1016/j.resourpol.2019.101555.
S. Jain and K. K. Bharti, “Chaos inspired Particle Swarm Optimization with Levy Flight for Genome Sequence Assembly,” arXiv preprint arXiv:2110.10623, 2021, https://doi.org/10.48550/arXiv.2110.10623.
S. Mirjalili, “Dragonfly algorithm: a new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems,” Neural Comput. Appl., vol. 27, no. 4, pp. 1053–1073, 2016, https://doi.org/10.1007/s00521-015-1920-1.
Y. Meraihi, A. B. Gabis, S. Mirjalili, and A. Ramdane-Cherif, “Grasshopper optimization algorithm: theory, variants, and applications,” Ieee Access, vol. 9, pp. 50001–50024, 2021, https://doi.org/10.1109/ACCESS.2021.3067597.
G. S. Kumar, G. Sahu, and M. Mathur, “A modified grasshopper optimization algorithm based on levy flight for cluster head selection in wireless sensor networks,” Int. J. Adv. Technol. Eng. Explor., vol. 9, no. 97, p. 1846, 2022, https://doi.org/10.19101/IJATEE.2021.875883.
W. Liu, W. Yan, T. Li, G. Han, and T. Ren, “A Multi-strategy Improved Grasshopper Optimization Algorithm for Solving Global Optimization and Engineering Problems,” Int. J. Comput. Intell. Syst., vol. 17, no. 1, 2024, https://doi.org/10.1007/s44196-024-00578-6.
S. Arora and P. Anand, “Chaotic grasshopper optimization algorithm for global optimization,” Neural Comput. Appl., vol. 31, no. 8, pp. 4385–4405, 2019, https://doi.org/10.1007/s00521-018-3343-2.
Y. A. N. Yan, M. A. Hongzhong, and L. I. Zhendong, “An Improved Grasshopper Optimization Algorithm for Global Optimization,” Chinese J. Electron., vol. 30, no. 3, pp. 451–459, 2021, https://doi.org/10.1049/cje.2021.03.008.
M. Sallam, I. Saif, Z. Saeed, and M. Fanni, “Lyapunov-based control of a teleoperation system in presence of time delay,” in International Conference on Advanced Intelligent Systems and Informatics, pp. 759–768, 2020, https://doi.org/10.1007/978-3-030-58669-0_67.
W. Aribowo et al., “Sand cat swarm optimization for controlling PID in DC motor,” Telkomnika (Telecommunication Comput. Electron. Control., vol. 22, no. 2, pp. 462–470, 2024, https://doi.org/10.12928/TELKOMNIKA.v22i2.25630.
A. M. Abushanab, H. M. Hasanien, and R. M. Sharkawy, “Frequency control of interconnected power system using dandelion optimization algorithm,” in 2024 6th International youth conference on radio electronics, electrical and power engineering (REEPE), pp. 1–7, 2024, https://doi.org/10.1109/REEPE60449.2024.10479799.
A. M. Abushanab, H. M. Hasanien, and R. M. Sharkawy, “Frequency Control of Interconnected Power System Utilizing Novel Optimization Approaches,” in 2024 FORTEI-International Conference on Electrical Engineering (FORTEI-ICEE), pp. 24–29, 2024, https://doi.org/10.1109/FORTEI-ICEE64706.2024.10824329.
S. Mirjalili, S. M. Mirjalili, and A. Lewis, “Grey Wolf Optimizer,” Adv. Eng. Softw., vol. 69, pp. 46–61, 2014, https://doi.org/10.1016/j.advengsoft.2013.12.007.
A. Mulyadi, M. Z. R. Amin, and M. K. Anam, “Control Mass-Spring-Damper Based on Tuning Trade-off PID Controller,” J. Ecotipe (Electronic, Control. Telecommun. Information, Power Eng., vol. 10, no. 1, pp. 52–60, 2023, https://doi.org/10.33019/jurnalecotipe.v0i0.3723.
I. Kasim and W. Riyadh, “On the Improved Nonlinear Tracking Differentiator based Nonlinear PID Controller Design,” Int. J. Adv. Comput. Sci. Appl., vol. 7, no. 10, 2016, https://doi.org/10.14569/ijacsa.2016.071032.
J. Wei and Z. Gao, “Design and analysis on fractional-order tracking differentiator,” in The 27th Chinese Control and Decision Conference (2015 CCDC), pp. 6128–6132, 2015, https://doi.org/10.1109/CCDC.2015.7161912.
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Aliaa A. Flaih, Ekhlas H. Karam, Yousra A. Mohammed

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

