Implementation of Kalman Filter on Pid Control System for DC Motor Under Noisy Condition
DOI:
https://doi.org/10.12928/biste.v6i3.11236Keywords:
Kalman Filter, PID Control, Noise, DC Motor, StabilityAbstract
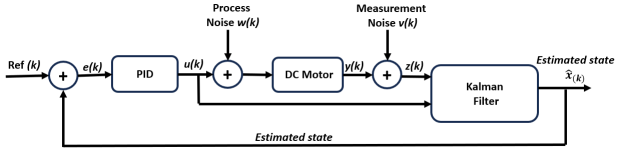
DC motors are actuators that are widely used in various fields. The reason is that DC motors are easy to control, high torque at low speed, and fast response. Angular velocity of DC motor is regulated automatically by using certain controls method, the most commonly used of which is PID control. The performance of the control system decreases in the presence of disturbance or noise. The presence of noise give has negative impacts such as instability in control response, decreased accuracy, and difficulty in tuning PID gain. The most common disturbance comes from the inaccuracy data due to measurement noise and process noise. In this study, the Kalman filter is proposed as a state estimator to reduce the influence of noise, both process noise and measurement noise. The Kalman filter provides an optimal estimate of the angular velocity of DC motor by minimizing the mean squared error. The estimated angular velocity from Kalman Filter is utilized as input for PID control. Simulation results show that the Kalman filter is capable to reduces the influence of measurement noise. In nominal condition, PID control give an Integral Absolute Error (IAE) of 344.56. Under noisy condition, PID control (without Kalman filter) has an IAE of 517.27, while Kalman filter-based PID control has an IAE of 345.25. The IAE reduction of 99.6% indicates that the proposed control system effectively minimizes errors, resulting in better performance and stability.
References
A. Ma’arif, Iswanto, N. M. Raharja, P. Aditya Rosyady, A. R. Cahya Baswara and A. Anggari Nuryono, “Control of DC Motor Using Proportional Integral Derivative (PID): Arduino Hardware Implementation,” 2020 2nd International Conference on Industrial Electrical and Electronics (ICIEE), pp. 74-78, 2020, https://doi.org/10.1109/ICIEE49813.2020.9277258.
R. K. Munje, P. P. Shinde and S. S. Kale, “Performance comparison of PI/PID controllers for DC motor,” 2014 Annual IEEE India Conference (INDICON), pp. 1-3, 2014, https://doi.org/10.1109/INDICON.2014.7030359.
Y. Cerezo, I. Lopez, A. Cuesta and L. Grau, “Methodology for tuning a multirate PID controller based on ´ heuristic optimization,” 2009 35th Annual Conference of IEEE Industrial Electronics, pp. 1800-1804, 2009, https://doi.org/10.1109/IECON.2009.5414840.
P. M. Meshram and R. G. Kanojiya, “Tuning of PID controller using Ziegler Nichols method for speed control of DC motor,” IEEE-International Conference On Advances In Engineering, Science And Management (ICAESM -2012), pp. 117-122, 2012.
A. Ma’arif, and N. R. Setiawan, “Control of DC Motor Using Integral State Feedback and Comparison with PID:
Simulation and Arduino Implementation,” Journal of Robotics and Control (JRC), vol. 2, no. 5, pp. 456-461, 2021,
https://doi.org/10.18196/jrc.25122
S. Abedini and H. Zarabadipour, “Tuning of an optimal PID controller with iterative feedback tuning method for DC motor,” The 2nd International Conference on Control, Instrumentation and Automation, pp. 611-615, 2011, https://doi.org/10.1109/ICCIAutom.2011.6356728.
A. Jaya, E. Purwanto, M. B. Fauziah, F. D. Murdianto, G. Prabowo and M. R. Rusli, “Design of PID-fuzzy for speed control of brushless DC motor in dynamic electric vehicle to improve steady-state performance,” 2017 International Electronics Symposium on Engineering Technology and Applications (IES-ETA), pp. 179-184, 2017, https:/doi.org/10.1109/ELECSYM.2017.8240399.
X. -j. Ma, Y. Liu and L. Li, “Research and simulation on PID control method for Brushless DC Motor based on genetic algorithm and BP neural network,” 2008 IEEE Vehicle Power and Propulsion Conference, pp. 1-4, 2008, https://doi.org/10.1109/VPPC.2008.4677765.
E. W. Suseno,and A. Ma’arif, “Tuning of PID Controller Parameters with Genetic Algorithm Method on DC Motor,” International Journal of Robotics and Control Systems, vol. 1, no. 1, pp. 41-53, 2021, https://doi.org/10.31763/ijrcs.v1i1.249.
E. S. Rahayu, A. Ma’arif, and A. C¸ akan, “Particle Swarm Optimization (PSO) Tuning of PID Control on DC Motor,” International Journal of Robotics and Control Systems, vol. 2, no. 2, pp. 435-447, https://doi.org/10.31763/ijrcs.v2i2.476.
D. Sandoval, I. Soto and P. Adasme, “Control of direct current motor using Ant Colony optimization,” 2015 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), pp. 79-82, 2015, https://doi.org/10.1109/Chilecon.2015.7400356.
M. Iorgulescu, M. Alexandru and R. Beloiu, “Noise and vibration monitoring for diagnosis of DC motor’s faults,” 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), pp. 724-729, 2012, https://doi.org/10.1109/OPTIM.2012.6231919.
D. Fodorean, C. Husar and C. Irimia, “Noise and vibration behavior evaluation of DC motor and PMSM in electric traction application,” 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), pp. 1184-1189, 2016, https://doi.org/10.1109/SPEEDAM.2016.7525931.
A. Ma’arif, I. Iswanto, A. A. Nuryono, and R. I. Alfian, “Kalman Filter for Noise Reducer on Sensor Readings,” Signal and Image Processing Letters, vol. 1, no. 2, pp. 50-61, 2019, https://doi.org/10.31763/simple.v1i2.2.
R. I. Alfian, A. Ma’arif, and S. Sunardi, “Noise Reduction in the Accelerometer and Gyroscope Sensor with the Kalman Filter Algorithm,” Journal of Robotics and Control (JRC), vol. 2, no. 3, pp. 180-189, 2021, https://doi.org/10.18196/jrc.2375
G. Welch and G. Bishop, An Introduction to the Kalman Filter, University of North Carolina at Chapel Hill Department of Computer Science Chapel Hill, 2001, https://courses.cs.washington.edu/courses/cse571/03wi/notes/welchbishop-tutorial.pdf.
J. Mehmood, M. Abid, M. S. Khan, A. Q. Khan and G. Mustafa, “Design of Speed Controller for a Brushless DC Motor using Feedback Linearization,” 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), pp. 657-661, 2021, https://doi.org/10.1109/IBCAST51254.2021.9393215.
D. Wenxiang, L. Chengyang, Y. Jianyong, M. Dawei and L. Guigao, “Extended state observer based output feedback asymptotic tracking control of DC motors,” 2015 34th Chinese Control Conference (CCC), pp. 4262-4267, 2015, https://doi.org/10.1109/ChiCC.2015.7260298.
W. Zhu, X. Ma, C. Sun and X. Niu, “Design of Fuzzy-PID Speed Controller for Brushless DC Motor,” 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE), pp. 1038-1042, 2019, https://doi.org/10.1109/EITCE47263.2019.9095061.
V. Verma and S. Chauhan, “Adaptive PID-Fuzzy Logic Controller for Brushless DC Motor,” 2019 3rd International conference on Electronics, Communication and Aerospace Technology (ICECA), pp. 445-449, 2019, https://doi.org/10.1109/ICECA.2019.8821941.
S. Sahoo, B. Subudhi and G. Panda, “Optimal speed control of DC motor using linear quadratic regulator and model predictive control,” 2015 International Conference on Energy, Power and Environment: Towards Sustainable Growth (ICEPE), pp. 1-5, 2015, https://doi.org/10.1109/EPETSG.2015.7510130.
N. D. Metha, A. M. Haque, and M. V. Makwana, “Controllers for Speed Control of Dc Motor Drives: Modeling & Simulations,” International Journal of Applied Research in Science and Engineering, pp. 135–141, 2016, http://ijarse.org/images/scripts/201629.pdf.
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Nurman Setiawan, Wahyu Caesarendra, Rania Majdoubi

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).

This journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

