Buletin Ilmiah Sarjana Teknik Elektro ISSN: 2685-9572
Automatic Fish Feeder and Telegram Based Aquarium Water Level Monitoring
Bagas Dewantara, Indah Sulistiyowati, Jamaaluddin Jamaaluddin
Department of Electrical Engineering, Universitas Muhammadiyah Sidoarjo, East Java, Indonesia
ARTICLE INFORMATION |
| ABSTRACT |
Article History: Submitted 08 January 2023 Revised 10 February 2023 Accepted 14 February 2023
|
| 
An important factor in maintaining fish in an aquarium is the timeliness of feeding fish. Most fish keepers are worried about the aquarium's feeding and water conditions, which must be done every day. Therefore, an automatic fish feeding tool and telegram-based monitoring of aquarium water levels were made to make it easier for fish keepers and aquarium owners to provide and monitor fish feed automatically according to a predetermined schedule. Monitoring the remaining feed and water level in the aquarium is done via Telegram. The components used in this tool are Esp 8266 as a microcontroller, RTC as a timer for scheduling fish feed, Ultrasonic as a detector for remaining fish feed, JSN-SR04T as a water level detector, LCD to display time and date as well as notifications and a servo motor functions to open and close the fish feed. The conclusion from the results obtained from this device is that the device works well and helps the aquarium owner to monitor and feed efficiently, despite some challenges such as delay due to poor internet connection. |
Keywords: Automatic Fish Feed; Esp8266; Telegram
|
Corresponding Author: Indah Sulistiyowati, Department of Electrical Engineering, Universitas Muhammadiyah Sidoarjo, East Java, Indonesia. Email: indah_sulistiyowati@umsida.ac.id |
|
This work is licensed under a Creative Commons Attribution-Share Alike 4.0 
|
|
Citation Document: B. Dewantara, I. Sulistiyowati, and J. Jamaaluddin, “Automatic Fish Feeder and Telegram Based Aquarium Water Level Monitoring,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 5, no. 1, pp. 98-107, 2023, DOI: 10.12928/biste.v5i1.7575. |
- INTRODUCTION
One of the conflicts experienced by many ornamental fish fans who have a lot of activities and often travel or fish fans who have many aquariums is how the fish owners forget to provide feed and turn on the lights in the aquarium that suit the needs of ornamental fish [1].
In our daily lives in big and small cities, many people keep ornamental fish in aquariums [2]. Since then until now, fish farming has become a hobby that most people are interested in [3]. Because it is easy to care for, some people want to keep it. Because the fish kept in the aquarium need to be fed regularly, the timing of feeding needs to be considered [4]. However, for many fish keepers, if no one is at home, it won't be easy to control the feed of the fish. Because the need for fish feed will be disturbed [5].
The fisheries sector in Indonesia is a sector that plays an important role [6]. Various types of fish can be bred in Indonesian waters [7]. One fish that is widely bred in Indonesia is Nila. Nila is a type of consumption fish that lives in freshwater [8]. Nila tends to be very easy to breed and is very easy to market because it is one of the most commonly consumed types of fish [9]. Nila breeding is carried out by the Indonesian people (fish cultivators) in ponds. Based on operational reasons, such as facilitating feeding, supervision and security, pest and disease control, and harvesting processes, To maximize the yield of cultivated Nila, proper portioning is needed [10]. Giving an excessive portion of feed will cause pond water quality to decrease due to excess ammonia gas caused by fish feed [11]. TTIE's right portion of fish feed is 3-4% of the total weight of fish in the pond [12]. This fish is aggressive in finding food when hungry. So this fish will make movements that make water ripples [13].
Aquaculture is farming in which different aquatic creatures provide a living habitat and all the required conditions and feed for healthy growth [14]. In this cultivation, the farmers mainly grow mollusks, prawns, small fish, etc [15]. This farming type is found in countries like Japan, India, UK, etc. This type of business has become a major part of their lives [16]. The person in this type of farming has to face many problems, mainly while feeding their fish [17]. These involve the depth of the pond, i.e. They had to be careful as it was a risk to their lives [18]. If the pond has a very large dimension, the farmer has to go to every end of the pond to spread the food evenly into it [19]. The amount of labor should be high for handling huge loads of feed [20]. The fish livestock industry has become one of the sources of regional income in Indonesia [21]. Therefore, this industry has received more attention from policyholders [22]. One problem in the terrestrial fish farming industry, exceptionally for large-scale industries, is the lack of quality livestock production due to a lack of attention in providing fish feed [23]. Using human labor in labor requires high costs; also, the accuracy and consistency of feeding time are less than optimal. Some entrepreneurs use robots or fish-feeding machines so that the consumption of fish feed can be organized with the appropriate quantity [24].
Fishkeeping is one of the people's hobbies that has been loved since then [25]. Because it is easy to care for, many people want to keep fish [26]. Fish that are kept in aquariums need to be regularly considered when feeding [27]. But because many carers are busy with other activities that are not expected. Therefore, fish aquariums are given a feed tool automatically [28]. The aquarium must be controlled continuously to fertilize good fish seeds [29]
Therefore, in this study, we designed automatic fish feeding using the NodeMCU ESP8266 microcontroller, which has been integrated with an IoT-based Wi-Fi module and has better system accuracy than previous studies [30]. In this research, IoT and Telegram were used because they can make it easier for the aquarium owner to monitor from the Telegram application without having to check the aquarium first. With a system like this, the aquarium owner can monitor the remaining fish feed in the feed container and the water level using the JSN-SR04T if the owner is not at home, the results obtained from this device is that the device works well and helps the aquarium owner to monitor and feed efficiently, despite some challenges such as delay due to poor internet connection.
- METHODS
The design of this system utilizes IoT and Telegram application. IoT is used to facilitate the user in providing regular feedings and monitoring the aquarium. There are two phases in the design, the hardware design and the software design. The hardware design requires block diagram and wiring design. The software
design includes flow diagram of the method used.
- System Design
In the design of this tool, there are three parts, The first part of the system design process involves wiring design, which outlines the components that will be used in the system and the connections between them. The second part involves creating a flowchart, which illustrates the system's workflow and how the various components interact with each other. The third part is designing a block diagram, which shows the input, processing, and output components of the system and how they relate to each other. Together, these three parts provide a comprehensive understanding of the system's design and operation.
- Wiring Design
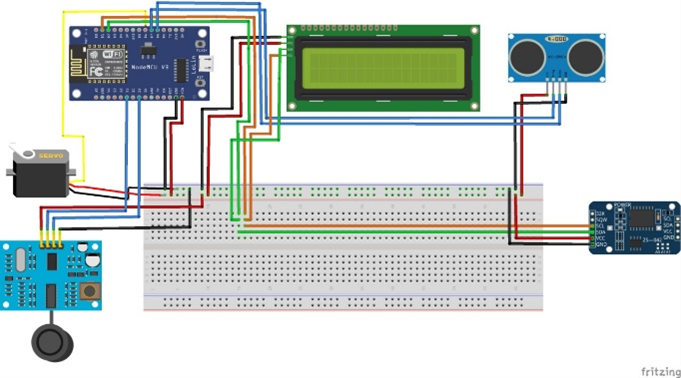
This wiring design as shown in Figure 1 seems to be for a system that uses a NodeMCU (a microcontroller board based on the ESP8266), an ultrasonic sensor (likely the HC-SR04), a JSN-SR04T sensor (likely another type of ultrasonic sensor), a servo motor, an LCD, and an RTC (real-time clock) module based on the DS3231 chip. The exact functionality of the system will depend on how the various components are programmed and connected.
Table 1 shows the specific pin connections between the NodeMCU and the various components in the system, including the ultrasonic sensor, JSN-SR04T sensor, servo motor, LCD, and RTC module. The table likely shows which NodeMCU pins are connected to the input/output pins of each component, as well as the type of connection (e.g. digital, analog, I2C, etc.). The correct pin connections must be made so the system can function properly.
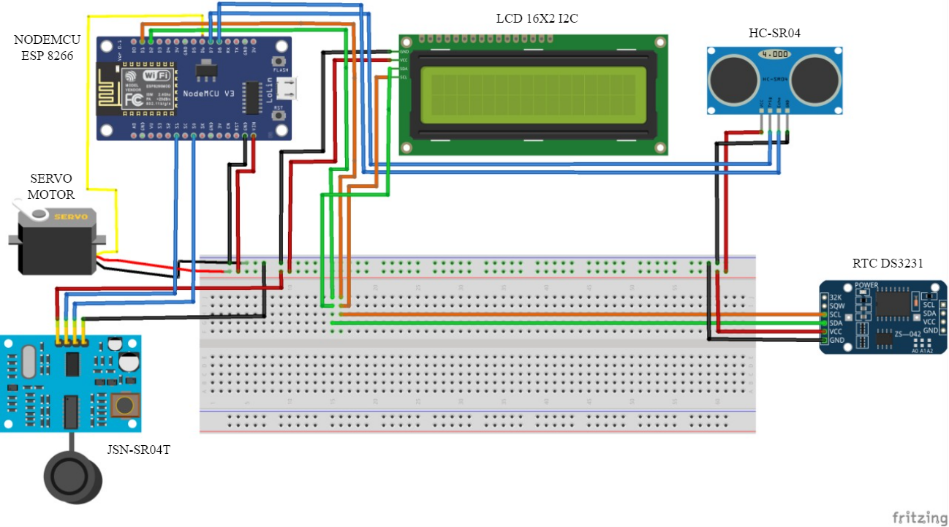
Figure 1. Wiring design
Table 1. NodeMCU Port Usage
No. | NodeMCU port | Usage |
1 | D1 | Pin SCL LCD/RTC |
2 | D2 | Pin SDA LCD/RTC |
3 | D6 | Motor Servo |
4 | D7 | Trig Ultrasonic |
5 | D8 | Echo Ultrasonic |
6 | SD3 | Trig JSN-SR04T |
7 | SD2 | Echo JSN-SR04T |
8 | Vin | 5V |
9 | GND | GND |
- System Flowchart
The flowchart system in this study is shown in Figure 2. The user opens the telegram application and can choose the menu, whether they want to schedule a feed time or provide a feed directly via Telegram. Suppose the user wants to schedule when the feed is given. In that case, the Telegram provides input to the NodeMCU, after which the NodeMCU gives a command to the servo motor to open the feed container according to the specified schedule, and a notification appears on the LCD and the Telegram when the feed is out of the container. If the user wants to feed directly, Telegram provides input to the NodeMCU, and the NodeMCU gives a command to the servo motor to open the feed container at that time. A notification appears on the LCD and the Telegram when the feed is out of the feed container.
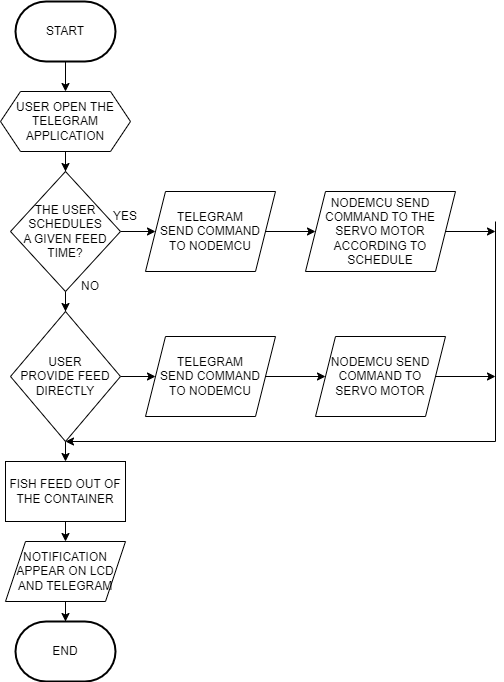
Figure 2. First flowchart program
For the second flowchart as shown in Figure 3, the program begins by initializing NodeMCU. And the user opens telegram the d selects the menu to see how high the aquarium water is. And the JSN-SR04T sensor sends data to NodeMCU after that NodeMCU sends data to Telegram and Telegram gets water level data in the aquarium.
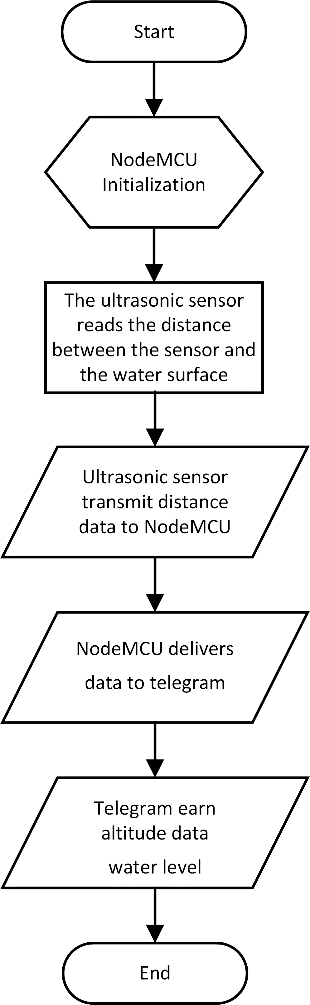
Figure 3. Second flowchart program
For the third flowchart as shown in Figure 4, the program begins by initializing NodeMCU. And the user opens Telegram and selects the menu to see how much feed is left in the container. And the ultrasonic sensor sends data to the NodeMCU, and the NodeMCU sends data on the remaining fish feed in the container in the form of a percentage.
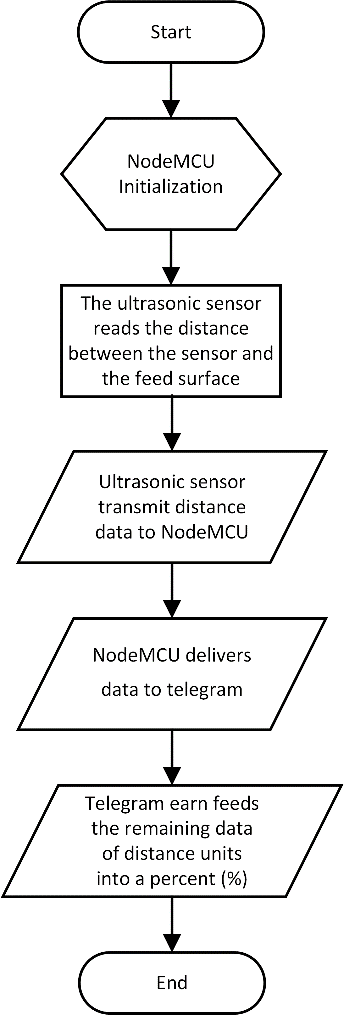
Figure 4. Third flowchart program
- Block Diagram System
To facilitate the design and manufacture of the tool, a block diagram of the system as a whole is made. The following is a block diagram of the control system for Automatic Fish Feeder Design and Telegram-Based Aquarium Water Level Monitoring as shown in Figure 5.
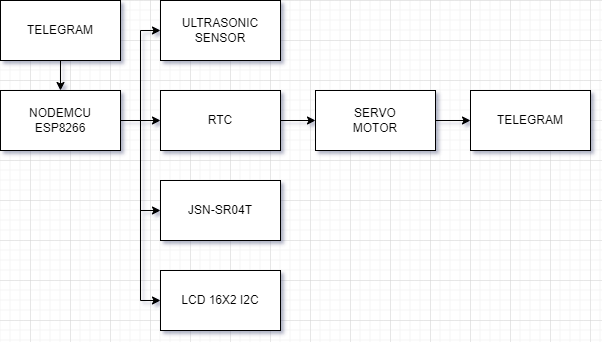
Figure 5. Block Diagram System
The design of the tool starts with the Telegram connecting to the NodeMCU, which then sends commands to the ultrasonic sensors, RTC, JSN-SR04T, LCD, and servo motor. The sensors collect data or output, which is then returned to the NodeMCU. The NodeMCU then sends notifications to the LCD and Telegram.
- RESULT AND DISCUSSION
Following is the result of the realization tool. Figure 6 is the result of tool realization components of the tool will be described with the following numbering; 1. HC-SR04, 2. NodeMCU ESP8266, 3. JSN-SR04T, 4. RTC DS3231, 5. Servo Motor, 6. LCD.
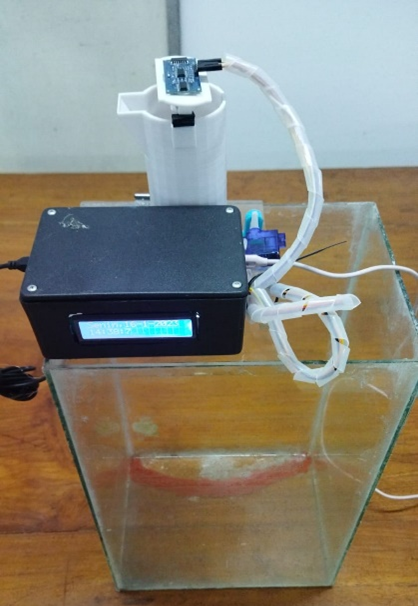
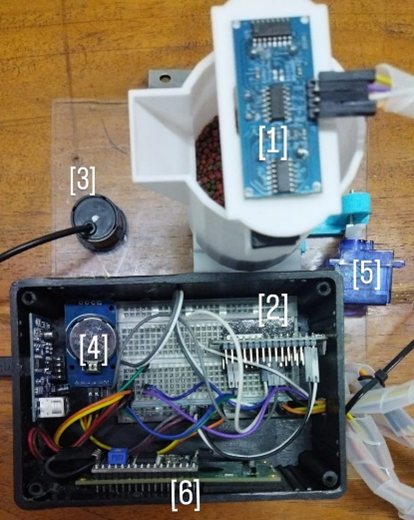
Figure 6. Result of tool realization
How to use this tool is as follows:
- The user opens Telegram and opens the telegram chatbot that has been made.
- Write "start" to start the bot with the tool.
- Then write "menu", and several menus appear
1 = Feeding now
2 = Feeding arrangements
3 = View the latest meal times
4 = Last feeding
5 = Leftover feed
6 = water level
- And we choose a number on the menu to do what we want.
- For example, we want to feed now. Then we write number 1 in the telegram chatbot, and the tool will work according to orders.
- If we want to know the rest of the fish feed in the fish meal container, we write number 5 on the telegram chatbot.
- Testing of Wi-Fi Connection to NodeMCU ESP8266
Test Wi-Fi connections to a NodeMCU ESP8266 were tested with waiting times of 4 and 5 seconds, and the test results are shown in Table 2. The results of the tests show that the NodeMCU ESP8266 can establish a medium-speed Wi-Fi connection.
Table 2. Testing Wi-Fi connection to NodeMCU ESP8266
Testing to- | Wi-Fi ESP8266 | Accuracy (%) |
Condition | Waiting Time (s) |
1st Test | Connected | 5 | Medium |
2nd Test | Connected | 6 | Medium |
3rd Test | Connected | 5 | Medium |
4th Test | Connected | 5 | Medium |
5th Test | Connected | 6 | Medium |
- Ultrasonic Sensor Testing
The ultrasonic sensor has been tested five times as shown in Table 3, and each time the results have matched the orders and sensor feed values. This conclusion is further supported by the accompanying graphical picture, demonstrating that the orders and ultrasonic sensor data are consistent with expectations. This shows that the sensor works as intended and has undergone testing and validation as shown in Table 4. Then from the test results a graphic plot is carried out as can be seen in Figure 7.
Table 3. Testing ultrasonic sensor
Testing to- | Ultrasonic Sensor | Percentage of remaining fish feed |
Condition | Waiting Time (s) |
1st Test | Full feed | 3 | 100% |
2nd Test | Medium feed | 6 | 60%˚ |
3rd Test | Under medium feed | 5 | 40% |
4th Test | Feed most | 4 | 20% |
5th Test | Feed runs out | 4 | 0% |
Table 4. Fault test of ultrasonic sensor and ruler
Testing to- | Ultrasonic Sensor | Error (%) |
Ruler (cm) | Ultrasonic sensor (cm) |
1stTest | 10 | 10 | 0% |
2ndTest | 7 | 7 | 0% |
3rdTest | 5 | 5 | 0% |
4thTest | 2 | 2 | 0% |
5thTest | 0 | 0 | 0% |
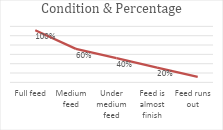
Figure 7. Chart testing ultrasonic sensor
- JSN-SR04T Sensor Testing
It is clear from the results of the five tests that the JSN-SR04T sensor has performed correctly and followed the instructions supplied. The test results in the Table 5 and Table 6 show this, showing that the commands and readings of the ultrasonic sensor for the water level are accurate. This demonstrates that the JSN-SR04T sensor has undergone adequate testing and validation.
Table 5. Testing JSN-SR04T Sensor
Testing to- | JSN-SR04T | Accuracy (%) |
Water level | Waiting Time (s) |
1st Test | 20cm | 6 | Medium |
2nd Test | 20cm | 7 | Medium |
3rd Test | 20cm | 8 | Medium |
4th Test | 20cm | 4 | Medium |
5th Test | 20cm | 10 | Medium |
Table 6. Fault test of JSN-SR04T sensor and ruler
Testing to- | JSN-SR04T | Accuracy (%) |
Water level | Ruler |
1st Test | 20cm | 21cm | 95% |
2nd Test | 20cm | 21cm | 95% |
3rd Test | 20cm | 21cm | 95% |
4th Test | 20cm | 21cm | 95% |
5th Test | 20cm | 21cm | 95% |
- Servo Motor Testing
The test findings from the five experimental servo trials matched the command and application of the servo. The test results of the tool are shown in Table 7 consistently show good results. All servo test commands and realizations were accurate, indicating that everything is working properly.
Table 7. Testing servo motor
Testing to- | Servo Motor | Servo Motor Angle |
Condition | Waiting Time (s) |
1st Test | Successful feeding | 3 | 90˚ − 0˚ |
2nd Test | Successful feeding | 6 | 90˚ − 0˚ |
3rd Test | Successful feeding | 5 | 90˚ − 0˚ |
4th Test | Successful feeding | 2 | 90˚ − 0˚ |
5th Test | Successful feeding | 3 | 90˚ − 0˚ |
- Telegram
In this research using the Telegram app as an interface, owners can easily control and monitor the feeding process from their phone. The availability of six different options provides owners with a range of information and control options to manage their aquarium. For example, the option to set feeding schedules allows owners to ensure that their fish receive consistent and regular feedings, while the ability to view the latest feeding time and check the remaining food helps owners keep track of their feeding habits. The option to check the water level in the aquarium is also important as this can have an impact on the health of the fish. Having this information readily available through the Telegram app can help owners quickly identify and address any potential problems with their aquarium as shown in Figure 8.
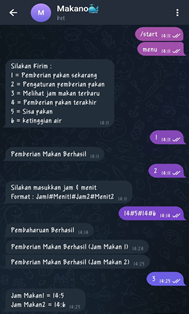
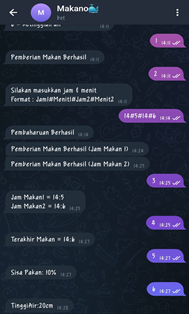
Figure 8. Menu in telegram
- CONCLUSIONS
Based on the results of the testing, it can be concluded that the internet connection test runs optimally, and the device can be connected so that commands from Telegram can be sent to the NodeMCU. Although there is still an average delay of 5 seconds to connect. And for the ultrasonic sensor test results, the ultrasonic sensor can read the distance of feeding the fish in the fish feeder. So it can be concluded how much feed is left in the container. For the JSN-SR04T sensor test, this sensor can detect the height of the aquarium water surface, but the obtained delay is relatively long, averaging around 7 seconds and the sensor reading is 1cm different from the measurement results with the sensor and the measurement results with a ruler. In the servo motor test results, the servo motor functions well as commanded from Telegram, but the problem is still the same as the poor internet connection delay. The suggestion for future research is to add a water temperature and water clarity detector and an automatic water pump if the water in the aquarium decreases.
REFERENCES
[1] T. E. Suherman, M. H. Widianto and Z. Athalia, “Internet of Things System for Freshwater Fish Aquarium Monitoring and Automation Using Iterative Waterfall,” 2022 4th International Conference on Cybernetics and Intelligent System (ICORIS), pp. 1-6, 2022, https://doi.org/10.1109/ICORIS56080.2022.10031310.
[2] R. Mahkeswaran and A. K. Ng, “Smart and Sustainable Home Aquaponics System with Feature-Rich Internet of Things Mobile Application,” in 2020 6th International Conference on Control, Automation and Robotics, ICCAR 2020, pp. 607–611, 2020, https://doi.org/10.1109/ICCAR49639.2020.9108041.
[3] M. J. M. Autos et al., “Automated aquaponics system and water quality monitoring with SMS notification for tilapia industry,” in IEEE Region 10 Annual International Conference, Proceedings (TENCON), pp. 367–372, 2020, https://doi.org/10.1109/TENCON50793.2020.9293868.
[4] R. Aisuwarya and E. F. Suhendra, “Development of Automatic Fish Feeding System based on Gasping Behavior,” in 2018 International Conference on Information Technology Systems and Innovation (ICITSI), pp. 470–473, 2018, https://doi.org/10.1109/ICITSI.2018.8696050.
[5] H. Kuroki, H. Ikeoka and K. Isawa, “Development of simulator for efficient aquaculture of Sillago japonica using reinforcement learning,” in Proceedings of International Conference on Image Processing and Robotics, ICIPRoB 2020, pp. 1-4, 2020, https://doi.org/10.1109/ICIP48927.2020.9367369.
[6] V. U. Tjhin and R. E. Riantini, “Intelligent Feeder Development Plan as Fish Feed Technology for Sustainable Integration and Delivery,” in 2021 3rd International Conference on Cybernetics and Intelligent System (ICORIS), pp. 1–5, 2021, https://doi.org/10.1109/ICORIS52787.2021.9649602.
[7] N. H. Harani, A. S. Sadiah and A. Nurbasari, “Smart Fish Feeder Using Arduino Uno With Fuzzy Logic Controller,” 2019 5th International Conference on Computing Engineering and Design (ICCED), 2019, pp. 1-6, 2019, https://doi.org/10.1109/ICCED46541.2019.9161114.
[8] W. -C. Hu, L. -B. Chen, B. -K. Huang and H. -M. Lin, “A Computer Vision-Based Intelligent Fish Feeding System Using Deep Learning Techniques for Aquaculture,” in IEEE Sensors Journal, vol. 22, no. 7, pp. 7185-7194, 2022, https://doi.org/10.1109/JSEN.2022.3151777.
[9] J. John and M. P. R, “Automated Fish Feed Detection in IoT Based Aquaponics System,” in 2021 8th International Conference on Smart Computing and Communications (ICSCC), pp. 286–290, 2021, https://doi.org/10.1109/ICSCC51209.2021.9528186.
[10] H. N. Binti Hasim, M. Ramalingam, F. Ernawan and Puviarasi R., “Developing fish feeder system using Raspberry Pi,” 2017 Third International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), pp. 246-250, 2017, https://doi.org/10.1109/AEEICB.2017.7972422.
[11] A. Ilvonen, K. Bennett and A. Bennett, “Design and Testing of an Autonomous Cable Mounted Aquaculture Robot,” in OCEANS 2022, Hampton Roads, pp. 1–6, 2022, https://doi.org/10.1109/OCEANS47191.2022.9977112.
[12] A. Abu-Khadrah, G. F. Issa, S. Aslam, M. Shahzad, K. Ateeq and M. Hussain, “IoT Based Smart Fish-Feeder and Monitoring System,” 2022 International Conference on Business Analytics for Technology and Security (ICBATS), pp. 1-4, 2022, https://doi.org/10.1109/ICBATS54253.2022.9759058.
[13] W. Vernandhes, N. S. Salahuddin, A. Kowanda and S. P. Sari, “Smart aquaponic with monitoring and control system based on iot,” 2017 Second International Conference on Informatics and Computing (ICIC), pp. 1-6, 2017, https://doi.org/10.1109/IAC.2017.8280590.
[14] Y. Saragai, T. Sato, H. Kuroki, H. Ikeoka and K. Isawa, “Study on Adapting the Auto Feeding System for Sillago Japonica to Actual Aquaculture Environment,” in 2022 2nd International Conference on Image Processing and Robotics (ICIPRob), pp. 1–6, 2022, https://doi.org/10.1109/ICIPRob54042.2022.9798738.
[15] M. N. Mamatha and S. N. Namratha, “Design & implementation of indoor farming using automated aquaponics system,” 2017 IEEE International Conference on Smart Technologies and Management for Computing, Communication, Controls, Energy and Materials (ICSTM), pp. 396-401, 2017, https://doi.org/10.1109/ICSTM.2017.8089192.
[16] R. Barosa, S. I. S. Hassen and L. Nagowah, “Smart Aquaponics with Disease Detection,” 2019 Conference on Next Generation Computing Applications (NextComp), pp. 1-6, 2019, https://doi.org/10.1109/NEXTCOMP.2019.8883437.
[17] L. -B. Chen, Y. -H. Liu, X. -R. Huang, W. -H. Chen and W. -C. Wang, “Design and Implementation of a Smart Seawater Aquarium System Based on Artificial Intelligence of Things Technology,” in IEEE Sensors Journal, vol. 22, no. 20, pp. 19908-19918, 2022, https://doi.org/10.1109/JSEN.2022.3200958.
[18] R. S. Paculanan, R. S. Cheng, S. C. Ambat and R. T. Adao, “A Fish Feeder Mechanism with Timer/GSM based,” in 2021 IEEE 13th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), pp. 1–6, 2021, https://doi.org/10.1109/HNICEM54116.2021.9732014.
[19] J. Dharanidharan and R. Puviarasi, “Simulation of Automatic Food Feeding System for Pet Animals,” 2018 Fourth International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), pp. 1-3, 2018, https://doi.org/10.1109/AEEICB.2018.8480849.
[20] M. M. Elsokah and M. Sakah, “Next Generation of Smart Aquaponics with Internet of Things Solutions,” 2019 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), pp. 106-111, 2019, https://doi.org/10.1109/STA.2019.8717280.
[21] A. Akhriana, I. Intan, N. Tamsir, N. Nirwana, R. W. Rahmi and R. Rahmadani, “Microcontroller Application in Feeding Fish Using an Android Mobile,” in 2021 3rd International Conference on Cybernetics and Intelligent System (ICORIS), pp. 1–6, 2021, https://doi.org/10.1109/ICORIS52787.2021.9649453.
[22] P. C. Menon, “IoT enabled Aquaponics with wireless sensor smart monitoring,” in Proceedings of the 4th International Conference on IoT in Social, Mobile, Analytics and Cloud, ISMAC 2020, pp. 171–176, 2020, https://doi.org/10.1109/I-SMAC49090.2020.9243368.
[23] K. Jadhav, G. Vaidya, A. Mali, V. Bankar, M. Mhetre and J. Gaikwad, “IOT based Automated Fish Feeder,” in 2020 International Conference on Industry 4.0 Technology, I4Tech 2020, pp. 90–93, 2020, https://doi.org/10.1109/I4Tech48345.2020.9102682.
[24] Y. Atoum, S. Srivastava and X. Liu, “Automatic feeding control for dense aquaculture fish tanks,” IEEE Signal Processing Letters, vol. 22, no. 8, pp. 1089–1093, 2015, https://doi.org/10.1109/LSP.2014.2385794.
[25] J. C. C. Egargue, F. A. Pacaigue, R. G. F. Galicia and E. G. V. Magwili, “Development of an Automated Aquaponics System with Hybrid Smart Switching Power Supply,” 2020 IEEE REGION 10 CONFERENCE (TENCON), pp. 544-549, 2020, https://doi.org/10.1109/TENCON50793.2020.9293853.
[26] A. Z. Mae H. Ambrosio et al., “Implementation of a Closed Loop Control System for the Automation of an Aquaponic System for Urban Setting,” 2019 IEEE 11th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), pp. 1-5, 2019, https://doi.org/10.1109/HNICEM48295.2019.9072729.
[27] L. K. S. Tolentino et al., “Development of an IoT-based Aquaponics Monitoring and Correction System with Temperature-Controlled Greenhouse,” 2019 International SoC Design Conference (ISOCC), pp. 261-262, 2019, https://doi.org/10.1109/ISOCC47750.2019.9027722.
[28] R. D. Clemente, “Development of On-Line Hatchery Monitoring and Feeding Management System for Nile Tilapia,” 2019 IEEE 11th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management ( HNICEM ), pp. 1-4, 2019, https://doi.org/10.1109/HNICEM48295.2019.9072727.
[29] S. Sansri, W. -Y. Hwang and T. Srikhumpa, “Design and Implementaion of Smart Small Aquaponics System,” 2019 Twelfth International Conference on Ubi-Media Computing (Ubi-Media), pp. 323-327, 2019, https://doi.org/10.1109/Ubi-Media.2019.00071.
[30] I. Sulistiyowati and M. I. Muhyiddin, “Disinfectant Spraying Robot to Prevent the Transmission of the Covid-19 Virus Based on the Internet of Things (IoT),” Journal of Electrical Technology UMY (JET-UMY), vol. 5, no. 2, 2021, https://doi.org/10.18196/jet.v5i2.12363.
AUTHOR BIOGRAPHY

| Bagas Dewantara is a student at the Universitas Muhammadiyah Sidoarjo majoring in electrical engineering. He has experience as an assistant in the electrical engineering laboratory at the university and is a member of the Umsida robot community. He and his team have achieved notable accomplishments, such as winning 2nd place at the national level in the sumo robot competition at the electro UNISMA VII competition and 1st place at the university level sumo robot competition in Asia at the IRTC competition in Malaysia. |
|
|

| Indah Sulistiyowati is a researcher who specializes in Renewable Energy Power Systems and Control Systems. Completed her master’s degree at Institut Teknologi Sepuluh Nopember majoring in Control System Electrical Engineering Subsidiary, and now is a lecturer at Universitas Muhammadiyah Sidoarjo.
|
|
|

| Jamaaluddin Jamaaluddin was born in Surabaya, on October 17, 1970, and completed his doctoral education at ITS Surabaya in 2020. The research fields carried out are the fields of power systems and artificial intelligence. Several scientific journal manuscripts have been published. he is a lecturer in the electrical engineering study program, at the Universitas Muhammadiyah Sidoarjo. East of Java Indonesia, became the head of the energy conversion and electric power engineering laboratory. He has IEEE members, etc
|
Automatic Fish Feeder and Telegram Based Aquarium Water Level Monitoring (Bagas Dewantara)