Buletin Ilmiah Sarjana Teknik Elektro ISSN: 2685-9572
Implementation of Wireless Communication System in
R-SCUAD Humanoid Soccer Robot with Checksum Error Detection Method Based on UDP Protocol
Yenny Rahmawati, Nuryono Satya Widodo
Department of Electrical Engineering, Universitas Ahmad Dahlan, Yogyakarta, Indonesia
ARTICLE INFORMATION |
| ABSTRACT |
Article History: Submitted 21 December 2021 Revised 08 March 2022 Accepted 26 February 2023
|
| 
This paper describes the communication system in the pattern of soccer games on the humanoid robot R-SCUAD. The communication system is an important part in the game of football. Along with the development of technology, robots are required to play soccer like humans, dribbling, kicking, running and coordinating well with their team. The communication system discussed in this paper is the process of sending and receiving data from one robot to another, assisted by a server. Beginning with robot 1 sending data to the server and forwarded to robot 2 or vice versa. The protocol used for this communication system is User Datagram Protocol (UDP) because UDP has several characteristics that support the occurrence of communication robots such as connection-less and unreliable. These two characteristics strongly support the communication system to be built. The checksum error detection method is a method used to detect errors in the R-SCUAD Robot communication system. The results show that the communication system built on the robot has been successfully implemented. From the test results it can be concluded that the success of the communication system is 98%.
|
Keywords: Checksum Error Detection; Robot Humanoid; Communication System; UDP
|
Corresponding Author: Nuryono Satya Widodo, Department of Electrical Engineering, Universitas Ahmad Dahlan, Yogyakarta, Indonesia. Email: nuryono.sw@ee.uad.ac.id
|
This work is licensed under a Creative Commons Attribution-Share Alike 4.0 
|
Document Citation: Y. Rahmawati and N. S. Widodo, “Implementation of Wireless Communication System in R-SCUAD Humanoid Soccer Robot with Checksum Error Detection Method Based on UDP Protocol,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 4, no. 3, pp. 194-203, 2022, DOI:10.12928/biste.v4i3.5402. |
INTRODUCTION
Humanoid robots are robots that mimic human shape and behavior and can be controlled automatically or manually [1][2]. One form of humanoid robot is a soccer robot. Soccer robots are one of the most interesting areas of research [3], because they embrace a number of disciplines such as computer vision [4], artificial intelligence [5], computer science, mechanical engineering and robotics [6]. The idea of soccer robots was first born in 1995 at the Korea Advance Institute of Science and Technology, soccer robots are one of the interesting research in autonomous robotic systems [7]. The Indonesian Robocup Socccer Humanoid League is a new title for the Kontes Robot Cerdas Indonesia (KRCI) Robo Soccer Humanoid League (RSHL) which is an event to select Indonesian representatives for the annual Robocup International Event. Humanoid Soccer Robot is a form of technology implementation in the field of robotics that has the ability to imitate human activities in playing soccer [8]. The soccer match between robots is one of the challenges in the world of robotics which is organized to be able to further develop robotics and artificial intelligence and as a place to exchange knowledge for researchers around the world [9][10][13].
In the Indonesian Robot Contest, Universitas Ahmad Dahlan sent one of its teams to participate in the robot contest called Robot Soccer Universitas Ahmad Dahlan (R-SCUAD). Like human soccer, Kontes Robot Sepak Bola Indonesia (KRSBI) Humanoid is a human-shaped soccer contest that aims to score goals against the opponent's goal and defend its own goal to win the match. The Indonesian Robot Contest is considered very strategic to be one of the leading educational facilities and a place to train student creativity in the field of robotics engineering with direct orientation to the same community at the world level [11][12]. This contest is also a national qualification event to represent Indonesia in RoboCup which is an official world-level robot football competition under the RoboCup organization [14], such as the FIFA organization in the human football world championship.
The Indonesian Humanoid Soccer Robot Contest has rules that must be followed including the robot can walk [15], kick the ball [16], see the ball, dribble and get up when it falls [17]. In addition, the robot must also have the ability to coordinate and cooperate well with the team [18][19][20]. One of them is that the robot can distinguish which team and which opponent and can build a strategy in playing soccer [21][22]. The R-SCUAD robot itself does not yet have the ability to recognize friend and opponent robots, therefore a wireless communication system is made on the humanoid soccer robot. R-SCUAD with checksum error detection method using Unit Datagram Protocol (UDP). This research aims to check and ensure that the data or messages sent by the robot are not lost.
METHODS
System Design
The block diagram of the communication system on the R-SCUAD robot is shown in Figure 1. In the data communication system, there are three important components that must be: a source that functions to send data or provide information, a receiver that acts as a destination for sending information and the internet as a medium for transmission or connection. The direction of communication uses 2 directions so that the server and client send data to each other.
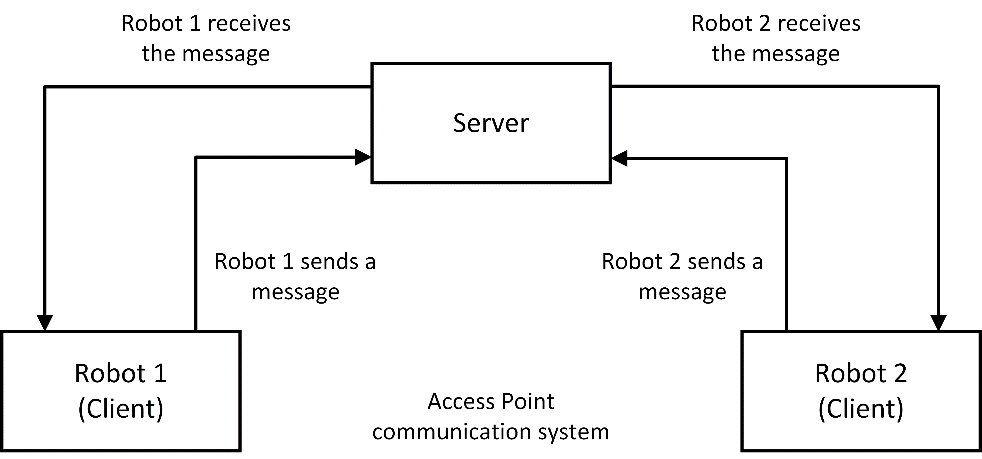
Figure 1. Block diagram of data transmission
Data Communication
In data communication (data transfer) there are at least 2 PCs, one as a client and one as a server. The basic purpose of this communication system is to carry out data exchange between two parties. In Figure 1 a specific example is shown, namely the communication between a workstation and a server connected to a public telephone network. Another example is the exchange of voice signals between two telephones on the same network [23].
Checksum Error Detection
A checksum is a method of error detection in data that uses an addition at the end of the data. The receiver calculates its checksum using the same method and compares it with the checksum that has been sent by the operator. If both are equal then the data is estimated to have no errors [24].
User Datagram Protokol (UDP)
The protocol used in this communication system is the UDP protocol. User Datagram Protocol (UDP) is one of the core members of the internet protocol suite. UDP sends data in the form of streams. The reason for using the UDP protocol is because UDP uses a simple transmission model with a minimum protocol mechanism. There is no dialog handshake, unreliability and connectionless. And there is no guarantee of delivery, reservation and duplicate. UDP provides checksums for data integrity and port numbers to handle various functions on source and destination datagrams. UDP protocol supports multicasting and broadcasting, which is suitable for applications that prefer packet loss over jitter or high delays. UDP does not generate retransmission delays [25].
IP Adress
IP address is a simple addressing method that allows multiple computers to connect to each other on the internet. The IP address is actually not given to the computer (host) or router, but to the network interface of the host/router. IP (Internet protocol) itself is designed to interconnect computer communication systems on packet switched networks [26].
Robot Cooperation Competition
The Humanoid Football Robot Contest (KRSBI-H) online period in 2020 and 2021 has 3 Technical Challenge (TC) categories, one of the competition categories is the robot cooperation competition. Robot cooperation competition requires good cooperation and communication between the two robots. Figure 2 is the field of TC robot cooperation.

Figure 2. Robot Cooperation Competition Field
Algorithm
The flowchart of the data reception system algorithm is shown in Figure 3. The flowchart of the data sending system algorithm is shown in Figure 4. The flowchart of the communication system algorithm used in the R-SCUAD robot is shown in Figure 5.
In the data reception system in Figure 3, the data received will be accommodated or taken and then checked. If the data received is data 1, the robot must be stationary because data 1 means that the robot sending the data has got the ball so that the robot receiving the data does not move or stop in place. Meanwhile, if data 2 is received, it means that the robot must search for the ball because the sending robot did not get the ball and asked to help search.
In the data transmission system in Figure 4, data is sent from robot 1 to robot 2 or vice versa to provide information about the status of the robot. What is meant by status is whether the robot gets the ball or not. Then there are 2 states that are sent. Data 1 is sent if the robot gets the ball. While data 2 is sent if the robot does not get the ball.
In the communication system used in the R-SCUAD robot in Figure 5, the communication system between the server and the R-SCUAD robot where the server will open a connection first as a server, if the robot's ip is registered in the server data base and connected to the same network, the robot can connect to the server. However, if there is interference during the connection or the connection is lost, the robot must reconnect. If the robot is successfully connected to the server, the next step is for the robot to wait for the server to determine the team data that the robot will receive.
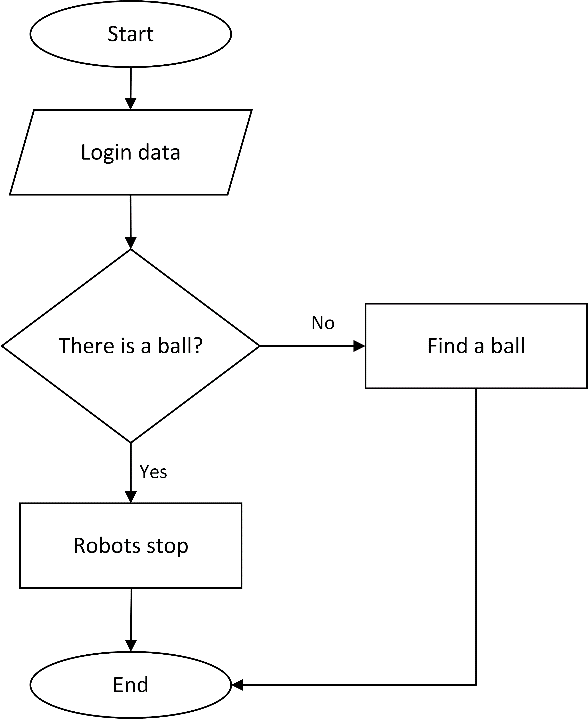
Figure 3. Data Reception System
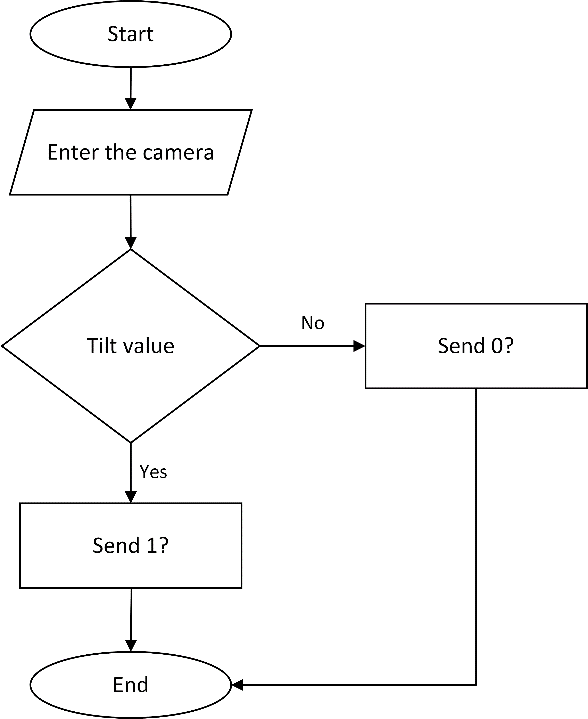
Figure 4. Data Delivery System
In this research as shown in Figure 5 the communication system, the robots chosen to test the system are Robot 1 and Robot 2. The server will receive char data in the form of '11 and 21' if the robot is successfully connected and data '10 and 20' if the robot has not connected to the server. Then if the robots are all connected then robot 1 starts kicking the ball. If robot 1 successfully kicks the ball then robot 1 will send data '11' to the server which means robot 1 successfully kicked the ball. After that the server will forward the message to robot 2. Robot 2 runs and looks for the ball, if robot 2 successfully finds and kicks the ball then robot 2 will send data '21' to the server. Then the server forwards the data to robot 1. Robot 2 runs and looks for the ball, if robot 2 manages to find and kick the ball into the goal then robot 2 will send data '21' to the server and the mission is complete, but if the ball is still close to the robot then robot 1 will return to kick the ball until the mission is complete, namely scoring a goal.
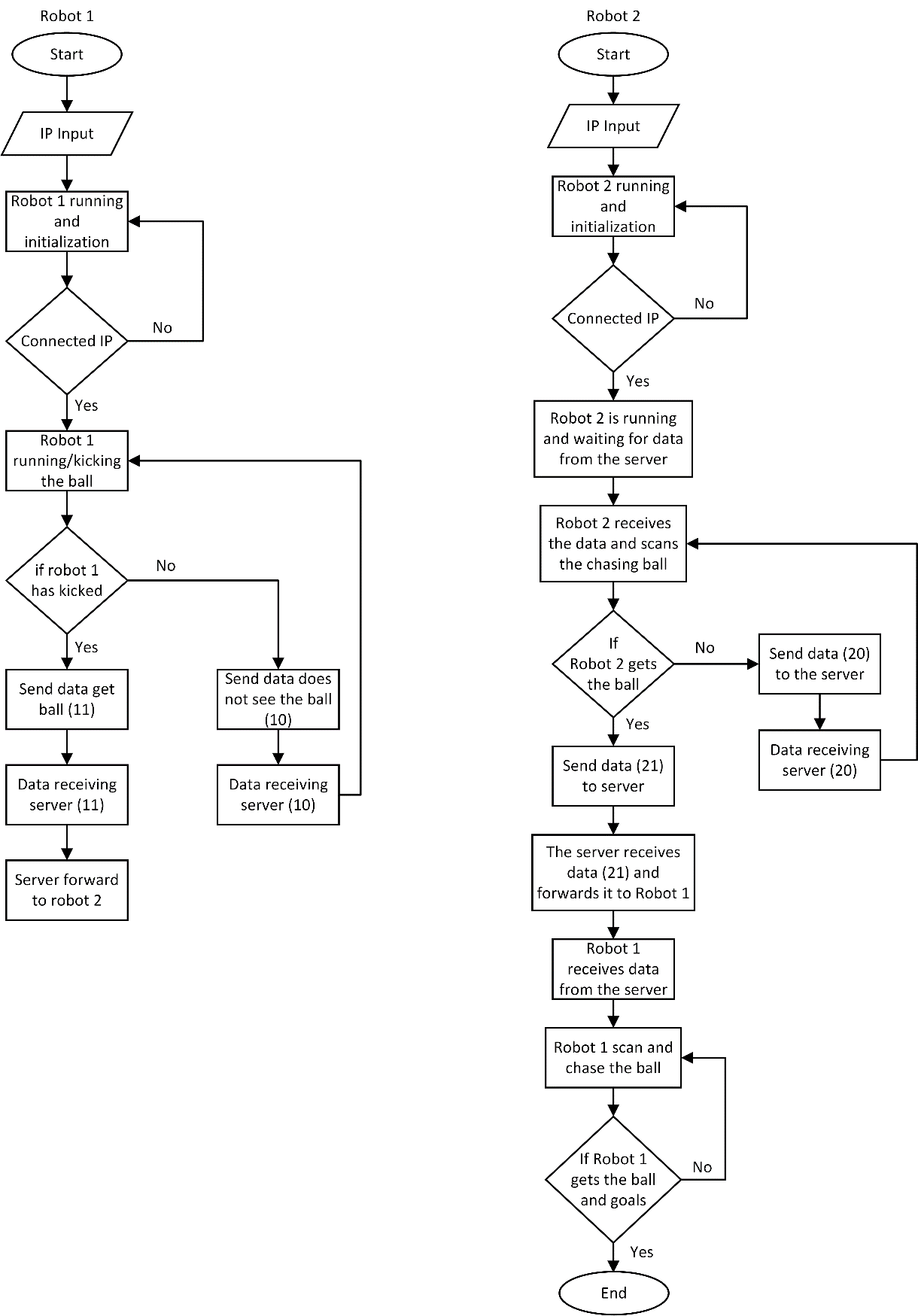
Figure 5. Communication System on R-SCUAD Robot
RESULT AND DISCUSSION
Data Packet Testing
In the first test, tests will be carried out based on data packets sent to the communication of the two robots. Package testing is testing data packets sent by the robot according to whether they are received by other robots or not. The data packets that will be sent can be seen in the program listing in Figure 6.
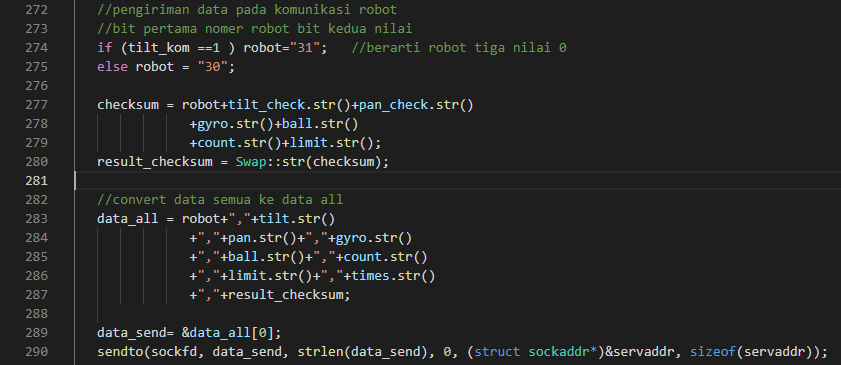
Figure 6. Program listing
The test results of the transmitted data packets can be seen in Table 1.
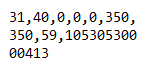
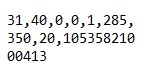
Table 1. Data packet delivery test results
Test | Package sent | Wireshark | Checksum |
1 | 
| 
| 
|
2 | 
| 
| 
|
3 | 
| 
| 
|
4 | 
| 
| 
|
5 | 
| 
| 
|
6 | 
| 
| 
|
7 | 
| 
| 
|
8 | 
| 
| 
|
In Table 1 is the result of sending data from the robot to the server in condition 1, in condition 1 8 trials were carried out where the robot sent 7 data packets and it can be seen that the packets sent by the robot are the same as the packets received by the server. The test results of sending data packets tested there are 3 conditions, namely the data packets sent, wireshark, and checksum. The last data referred to in the data retrieval above is the data packet sent by the robot to the server, as for the data sent is the robot's back number (31 robots 3 got the ball and 30 robots 3 did not / have not gotten the ball), robot tilt value (0-50), robot pan value (0-30), robot gyro / orientation value (0-360), ball position (0 means not getting the ball, 1 means getting the ball), counter value (shows the course of the counter value) and counter limit value (shows the limit of the counter value).
The second column is the result of wireshark capture, where wireshark monitors and analyzes packets passing through the network. More detailed results of wireshark capture can be seen in the wireshark capture attachment. The third column is the result of checksum data, where the data sent is reversed to analyze whether there is corrupt or missing data when received by the server, after which the data is reversed again or written as checksum data to make it easier to check the data received according to the data sent. The purpose of this checksum is to analyze the data sent by the robot is the same as the data received by the server. From the 8 experiments tested, it can be seen that in condition 1 all data sent by the robot is the same as the data received by the server.
Analysis of data packet delivery testing from 8 trials obtained the results shown in Equation (1).
| 
| (1) |
So the percentage of success is the number of success rates divided by the number of trials. From the above results, it is obtained that the test results of sending data have a success rate of 100%.
Latency Testing
Latency testing is testing the time interval between when data is sent until data is received or the length of time to send data. Testing the latency of data sent by the robot to the server can be seen in the program listing shown in Figure 7.
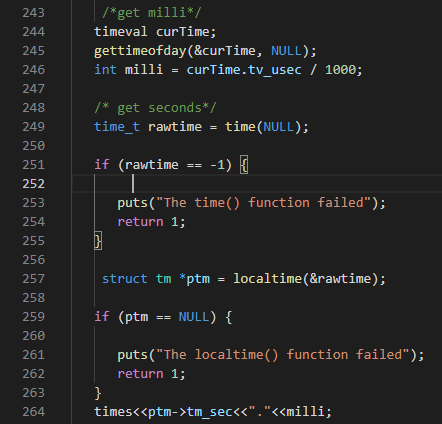
Figure 7. Program listing latency
The results of the communication latency test can be seen in Table 2.
Table 2. Robot information delivery testing
Test | Send | Received | Delay (ms) |
1 | 
| 
| 0.780 |
2 | 
| 
| 0.749 |
3 | 
| 
| 0.531 |
4 | 
| 
| 0.684 |
5 | 
| 
| 0.40 |
6 | 
| 
| 0.578 |
7 | 
| 
| 0.933 |
In Table 2 is the result of testing the latency of sending and receiving data from the robot to the server in condition 1, it can be seen that the delay in sending from the robot to the server is only a few milliseconds.
Data analysis on latency testing in condition 1 as in the results of Equation (2).
| 
| (2) |
| 
|
|
So the average delay in latency testing in condition 1 is 0.66ms.
Distance Testing
The third test will be tested based on distance to find out how far the robot can still connect to the server based on the length of the field used for the race. The length of the field used in this test is 7m, which is the maximum length of the field used for the race. The results of distance testing in distance testing can be seen in Table 3.
Table 3. Test results at 7m distance
Test | Robots Position | Connection |
1 | 
| 
|
2 | 
|
|
3 | 
|
|
4 | 
|
|
5 | 
|
|
From 5 tests carried out by testers at a distance of 7 meters from the start with different positions, it can be seen that the robot is still well connected to the server. The robot image with a blue background is a display on the server that shows that the robot is connected to the server.
Data analysis on the 7m distance test is shown in Equation (3).
| 
| (3) |
The percentage of success in this experiment is obtained from the number of successes divided by the number of trials. The result of the percentage of success of this distance test is 100%.
CONCLUSION
Based on testing the wireless communication system on the R-SCUAD robot using the checksum error detection method with the UDP protocol made by researchers, it can be concluded that the communication system is running well. The test results showed that robot and server communication is still connected as far as 7 meters. The information sent by the robot is the same as the information received by the robot or there is no corrupt data. In addition, the delay rate when sending data is only a few milliseconds. The success rate of the communication system created is 98%.
ACKNOWLEDGMENT
Thank you to the editors and reviewers for all their advice, input and for helping in the process of publishing the manuscript. Thanks also go to the UAD bimawa, supervisors, Electrical Engineering study program lecturers and friends who have supported the research and provided moral and material assistance.
REFERENCES
[1] S. Dwijayanti, M. Iqbal and B. Y. Suprapto, “Real-Time Implementation of Face Recognition and Emotion Recognition in a Humanoid Robot Using a Convolutional Neural Network,” in IEEE Access, vol. 10, pp. 89876-89886, 2022, https://doi.org/10.1109/ACCESS.2022.3200762.
[2] D. Zhang et al., “Human-Robot Shared Control for Surgical Robot Based on Context-Aware Sim-to-Real Adaptation,” 2022 International Conference on Robotics and Automation (ICRA), pp. 7694-7700, 2022, https://doi.org/10.1109/ICRA46639.2022.9812379.
[3] Y. Sun and S. Sun, “A Novel Robust Color Tag for a Highly Efficient Soccer Robot Vision System,” 2022 IEEE/ACIS 22nd International Conference on Computer and Information Science (ICIS), pp. 94-99, 2022, https://doi.org/10.1109/ICIS54925.2022.9882489.
[4] C. O. Y-. Banjo, O. A. Ugot and E. Ehiorobo, “Object detection for robot coordination in robotics soccer,” Nigerian Journal of Technological Development, vol. 19, no. 2, pp. 136-142, 2022, https://doi.org/10.4314/njtd.v19i2.5.
[5] M. Szemenyei and V. E-. Castro, “Fully neural object detection solutions for robot soccer,” Neural Computing and Applications, vol. 34, no. 24, pp. 21419-21432, 2022, https://doi.org/10.1007/s00521-021-05972-1.
[6] G. Passault, C. Gaspard and O. Ly, “Robot Soccer Kit: Omniwheel Tracked Soccer Robots for Education,” 2022 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), pp. 34-39, 2022, https://doi.org/10.1109/ICARSC55462.2022.9784808.
[7] V. Antipov, V. Kokovkina, V. Kirnos, and A. Priorov, “Computer vision system for recognition and detection of color patterns in real-time task of robot control,” 2017 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SINKHROINFO), pp. 1-5, 2017, https://doi.org/10.1109/SINKHROINFO.2017.7997496.
[8] Y. Ji, Y. Yang, F. Shen, H. T. Shen and X. Li, “A Survey of Human Action Analysis in HRI Applications,” in IEEE Transactions on Circuits and Systems for Video Technology, vol. 30, no. 7, pp. 2114-2128, 2020, https://doi.org/10.1109/TCSVT.2019.2912988.
[9] C. Hong, I. Jeong, L. F. Vecchietti, D. Har and J. -H. Kim, “AI World Cup: Robot-Soccer-Based Competitions,” in IEEE Transactions on Games, vol. 13, no. 4, pp. 330-341, 2021, https://doi.org/10.1109/TG.2021.3065410.
[10] E. Antonioni, V. Suriani, F. Riccio and D. Nardi, “Game Strategies for Physical Robot Soccer Players: A Survey,” in IEEE Transactions on Games, vol. 13, no. 4, pp. 342-357, 2021, https://doi.org/10.1109/TG.2021.3075065.
[11] A. Tiryaki and S. Adigüzel, “The Effect of STEM-Based Robotic Applications on the Creativity and Attitude of Students,” Journal of science learning, vol. 4, no. 3, pp. 288-297, 2021, https://doi.org/10.17509/jsl.v4i3.29683.
[12] M. S. Zuhrie, I. G. P. A. Buditjahjanto, L. Nurlaela and I. Basuki, “Do educational robotics competitions impact students’ learning?,” In Journal of Physics: Conference Series, vol. 1810, no. 1, p. 012045, 2021, https://doi.org/10.1088/1742-6596/1810/1/012045.
[13] H. Choi et al., “On the use of simulation in robotics: Opportunities, challenges, and suggestions for moving forward,” Proceedings of the National Academy of Sciences, vol. 118, no. 1, 2021, https://doi.org/10.1073/pnas.1907856118.
[14] H. Wang, C. Dong and Y. Fu, “Optimization analysis of sport pattern driven by machine learning and multi-agent,” Neural Computing and Applications, vol. 33, pp. 1067-1077, 2021, https://doi.org/10.1007/s00521-020-05022-2.
[15] Y. Ji et al., “Hierarchical Reinforcement Learning for Precise Soccer Shooting Skills using a Quadrupedal Robot,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1479-1486, 2022, https://doi.org/10.1109/IROS47612.2022.9981984.
[16] A. F. Muzio, M. R. Maximo and T. Yoneyama, “Deep Reinforcement Learning for Humanoid Robot Behaviors,” Journal of Intelligent & Robotic Systems, vol. 105, no. 1, p. 12, 2022, https://doi.org/10.1007/s10846-022-01619-y.
[17] K. Cahyono, I. K. Wibowo and M. M. Bachtiar, “A New Kicker System of Wheeled Soccer Robot ERSOW Using Fuzzy Logic Method,” 2020 International Electronics Symposium (IES), pp. 219-225, 2020, https://doi.org/10.1109/IES50839.2020.9231882.
[18] X. Cai et al., “Robot and its living space: A roadmap for robot development based on the view of living space,” Digital Communications and Networks, vol. 7, no. 4, pp. 505-517, 2021, https://doi.org/10.1016/j.dcan.2020.12.001.
[19] J. J. R-. Gómez, E. G-. Gironda, and A. Barrientos, “A survey on robotic technologies for forest firefighting: Applying drone swarms to improve firefighters’ efficiency and safety,” Applied Sciences, vol. 11, no. 1, p. 363, 2021, https://doi.org/10.3390/app11010363.
[20] A. Alam, “Social robots in education for long-term human-robot interaction: Socially supportive behaviour of robotic tutor for creating robo-tangible learning environment in a guided discovery learning interaction,” ECS Transactions, vol. 107, no. 1, p. 12389, 2022, https://doi.org/10.1149/10701.12389ecst.
[21] Z. He, “The Design of a Soccer Robot Game Strategy Based on Fuzzy Decision Algorithms,” 2022 19th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), pp. 1-5, 2022, https://doi.org/10.1109/ICCWAMTIP56608.2022.10016619.
[22] E. Antonioni, V. Suriani, F. Solimando, D. Nardi and D. D. Bloisi, “Learning from the Crowd: Improving the Decision Making Process in Robot Soccer Using the Audience Noise,” In RoboCup 2021: Robot World Cup XXIV, pp. 153-164, 2022, https://doi.org/10.1007/978-3-030-98682-7_13.
[23] S. Macenski, T. Foote, B. Gerkey, C. Lalancette and W. Woodall, “Robot Operating System 2: Design, architecture, and uses in the wild,” Science Robotics, vol. 7, no. 66, 2022, https://doi.org/10.1126/scirobotics.abm6074.
[24] P. Kasu, P. Hamandawana and T. S. Chung, “TPBF: Two-Phase Bloom-Filter-Based End-to-End Data Integrity Verification Framework for Object-Based Big Data Transfer Systems,” Mathematics, vol. 10, no. 9, p. 1591, 2022, https://doi.org/10.3390/math10091591.
[25] H. Tschofenig and E. Baccelli, “Cyberphysical Security for the Masses: A Survey of the Internet Protocol Suite for Internet of Things Security,” in IEEE Security & Privacy, vol. 17, no. 5, pp. 47-57, 2019, https://doi.org/10.1109/MSEC.2019.2923973.
[26] F. Nizzi, T. Pecorella, F. Esposito, L. Pierucci and R. Fantacci, “IoT Security via Address Shuffling: The Easy Way,” in IEEE Internet of Things Journal, vol. 6, no. 2, pp. 3764-3774, 2019, https://doi.org/10.1109/JIOT.2019.2892003.
AUTHOR BIOGRAPHY

| Yenny Rahmawati currently pursuing his undergraduate education at the Department of Electrical Engineering Universitas Ahmad Dahlan. Email: yenny1700022065@webmail.uad.ac.id
|
|
|

| Nuryono Satya Widodo currently the author is a permanent lecturer at the Department of Electrical Engineering at Universitas Ahmad Dahlan. His research field is Robotics & Intelligent – Control.
|
|
|
Implementation of Wireless Communication System in R-Scuad Humanoid Soccer Robot with Checksum Error Detection Method Based on UDP Protocol (Yenny Rahmawati)