Buletin Ilmiah Sarjana Teknik Elektro ISSN: 2685-9572
Vol. 8, No. 3, June 2026, pp. 638-653
Motorcycle Parking Availability Monitoring Using YOLOv5 and Mobile-Based Systems
R. Endro Wibisono 1, Anita Susanti 1, Kusuma R. Haratama 1, Widi Aribowo 2,
Karin Nur Fitria Ariyanti 1, Diego Oliva 3, Hisham A. Shehadeh 4, Abubakar Umar 5
1 Department of Transportation, Faculty of Vocational, Universitas Negeri Surabaya, Surabaya, Indonesia
2 Department of Electrical Engineering, Faculty of Vocational, Universitas Negeri Surabaya, Surabaya, Indonesia
3 Departamento de Ciencias Computacionales, Universidad de Guadalajara, CUCEI, Av. Revolución 1500,
44430 Guadalajara, Jalisco, Mexico
4 Faculty of Computer Science and Informatics, Amman Arab University, Amman 11953, Jordan
5 Department of Computer Engineering, Ajmadu Bello University, Zaria, Kaduna State, Nigeria
ARTICLE INFORMATION |
| ABSTRACT |
Article History: Received 03 March 2026 Revised 02 May 2026 Accepted 20 May 2026 |
| 
The increasing number of motorcycles in developing countries has intensified parking management challenges, particularly in high-density environments with irregular vehicle arrangements. This study proposes a motorcycle parking availability detection system using the YOLOv5 object detection algorithm to address limitations of conventional parking methods. The research contribution is the development of a context-aware detection framework using a locally collected dataset and the evaluation of its performance under real-world parking conditions.The dataset consists of 1,200 images collected from campus parking areas and is divided into training, validation, and testing sets. The images were annotated into occupied and vacant classes and trained using YOLOv5 with 100 epochs. Model performance was evaluated using precision, recall, F1-score, and mean Average Precision (mAP@0.5) on a held-out test set.The results show that the model achieves an F1-score of 0.57 and mAP@0.5 of 0.566, indicating moderate detection performance in dense and occluded environments. Although a precision of 1.00 is obtained at a confidence threshold of 0.978, this condition significantly reduces recall, highlighting a trade-off between detection accuracy and coverage. The confusion matrix and recall–confidence analysis reveal that errors are primarily caused by occlusion, shadow effects, and background interference. Compared to previous studies focusing on car parking detection, this system demonstrates comparable performance while addressing the unique complexity of motorcycle parking. However, the relatively small dataset size and environmental variability limit generalization.In conclusion, the proposed system provides a feasible initial approach for motorcycle parking detection, but further improvements in dataset diversity, annotation quality, and model robustness are required to achieve reliable large-scale deployment. |
Keywords: Motorcycle Parking Detection; YOLOv5; Smart Parking in Developing Countries |
Corresponding Author: R. Endro Wibisono, Department of Transportation, Faculty of Vocational, Universitas Negeri Surabaya, Surabaya, Indonesia. Email: endrowibisono@unesa.ac.id |
This work is licensed under a Creative Commons Attribution-Share Alike 4.0 
|
Document Citation: R. E. Wibisono, A. Susanti, K. R. Haratama, W. Aribowo, K. N. F. Ariyanti, D. Oliva, H. A. Shehadeh, and A. Umar, “Motorcycle Parking Availability Monitoring Using YOLOv5 and Mobile-Based Systems,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 8, no. 3, pp. 638-653, 2026, DOI: 10.12928/biste.v8i3.16087. |
- INTRODUCTION
The issue of limited parking space has become a significant global challenge, particularly in densely populated urban areas. In developing countries such as Indonesia and India [1], the rapid growth in the number of motorcycles has not been matched by adequate parking infrastructure [2][3]. In Indonesia, motorcycles account for more than 84% of motor vehicles [4], with the highest concentration in major cities such as Jakarta and Surabaya [1],[5]. A similar situation is observed in New Delhi and Bangkok [6], where two-wheeled vehicle users often struggle to find available parking spaces, contributing to increased traffic congestion [7][8], higher carbon emissions [9], and reduced urban mobility efficiency.
In several developed countries such as Germany and Japan, parking challenges have been addressed through the implementation of intelligent and automated parking management systems [10][11]. However, the complexity of the required infrastructure and the associated high implementation costs limit their adoption in developing countries [12]. As urban mobility demands continue to rise [13] and the number of two-wheeled vehicles increases—particularly in university campuses [14] and community activity centers—conventional parking solutions have proven to be no longer effective [15]. Conventional parking management systems, such as those based on ultrasonic sensors or simple image processing methods, are generally designed for car parking environments. These approaches are less effective when applied to motorcycle parking due to its distinct characteristics. Motorcycles tend to be parked in a disorganized manner, with high density and very close spacing between vehicles. Additionally, the level of occlusion (objects blocking each other) in motorcycle parking is higher than in car parking, thereby reducing the accuracy of conventional detection methods.
The rapid advancement of artificial intelligence (AI) technologies, such as predictive analytics, automated case assessment, chatbots, and virtual assistants, is significantly transforming the traditional landscape of social work practice. The You Only Look Once (YOLO) family of models has demonstrated strong performance in real-time object detection. The latest models, such as YOLOv8, YOLOv10, and YOLOv11, offer improved accuracy and efficiency. However, these models generally require higher computational resources, making them less than ideal for implementation on mobile devices or edge-based systems. In contrast, YOLOv5 offers a balance between detection accuracy, computational efficiency, and ease of implementation. Its lightweight architecture and stable performance make it more suitable for real-time mobile applications, particularly in resource-constrained environments such as those in developing countries. Edge computing requires AI-capable hardware, which can be very costly. With cloud computing, however, we can leverage the existing CCTV networks widely available in parking lots, thereby reducing costs and enabling centralized YOLO processing across multiple CCTV locations. Therefore, this research uses YOLOv5 as the primary model to ensure that the resulting system is practical and widely implementable. In this context, visual detection technology based on machine learning has emerged as a promising solution. Real-time object detection algorithms such as YOLOv5 (You Only Look Once) have demonstrated strong performance in detecting objects efficiently in complex environments [16][17]. The You Only Look Once (YOLO) method can detect more than one object. Previous studies reported that YOLO-based detection models can achieve high accuracy under controlled conditions, reaching up to 94.9% in certain detection scenarios [18]. However, most existing research focuses primarily on car parking detection rather than motorcycle parking environments. Motorcycles exhibit distinct characteristics such as smaller size, irregular parking orientation, and high parking density, which increase detection complexity [19].
In addition, several recent studies highlight that most prior models have not adequately considered real-world dynamics such as extreme lighting conditions [20], camera angles [21], and parking density in campus environments [22][23]. The implementation of artificial intelligence (AI) tools also presents serious challenges in preserving the relational aspects that are crucial for their practical application. Therefore, research on motorcycle parking detection systems that are reliable, adaptable to environmental variations, and capable of operating in real time on lightweight platforms such as mobile applications is becoming increasingly urgent and relevant [24].
Previous studies have contributed to the development of parking detection systems; however, the majority have focused on cars or merely on object classification [25]. Aguswandi et al. employed YOLOv11 to detect car parking slots with a precision of up to 99% [26]. Tanuwijaya et al. (2020) implemented YOLOv3 and YOLOv3-Tiny to detect vehicle presence and classification, but not specifically for motorcycle parking spaces [27]. Similarly, Setiyana et al. (2024) and Chianyung (2023) developed YOLOv4-based systems, though their accuracy for motorcycles remained low due to the reliance on general datasets such as COCO, which fail to represent local contexts [27][28]. Bochkovskiy et al. (2020) and Wang et al. (2021) also reported strong results in car detection but did not address the complexities of dense and irregular motorcycle parking environments [29][30]. This study, therefore, introduces a targeted solution for detecting motorcycle parking availability, employing a more contextual approach, utilizing locally collected datasets, and optimizing model performance to address the unique challenges of parking areas in Indonesia.
As an innovative effort to address these challenges, this study proposes a YOLOv5-based motorcycle parking detection system, and cost-effective approach for direct implementation in real-world environments [31][32]. The use of YOLOv5, which is lightweight yet highly accurate [34], combined with locally collected datasets and performance evaluation based on F1-score, precision, and recall [35], results in an efficient and contextually relevant system. Furthermore, this research introduces a mobile-based prototype that can be scaled into broader solutions for educational institutions, offices, and other public facilities [34][35]. Thus, this study is expected to serve as a significant foundation for the sustainable development of motorcycle parking detection technologies and to make a tangible contribution to improving transportation infrastructure in developing countries [34]. Although numerous studies have explored smart parking detection using deep learning techniques, most existing approaches primarily focus on car-based parking environments and rely on generalized datasets that do not adequately represent the characteristics of motorcycle parking areas. Motorcycles present unique challenges, including irregular parking orientation, high vehicle density, and frequent occlusion, which reduce the reliability of conventional detection systems. Therefore, this study proposes a YOLOv5-based motorcycle parking availability detection system specifically designed for motorcycle-dominated parking environments.
The research focuses on the application of YOLOv5 in the transportation sector. The novelty of this research lies in three main contributions. First, this study develops a motorcycle-specific parking detection framework using the YOLOv5 object detection algorithm capable of handling dense and irregular motorcycle parking arrangements. Second, a context-aware dataset consisting of 1,200 real-world images collected from campus motorcycle parking areas is constructed to represent real operational conditions, including lighting variations, parking density, and irregular vehicle orientation. Third, the trained YOLOv5 model is integrated into an Android-based mobile application to enable real-time monitoring of motorcycle parking availability. By addressing the challenges of dense motorcycle parking environments, this study provides a practical and scalable solution for intelligent parking management in developing-country settings. The article consists of the method, mathematical formulation, and explanation of the proposed method approach in section 2. Section 3 is a simulation and discussion. The final section contains the research conclusions.
- METHODS
This study employs a deep learning approach using the YOLOv5 object detection model to detect motorcycle parking availability through a mobile-based monitoring. The research process follows the artificial intelligence project cycle, which includes problem identification, data collection, data preprocessing, model training, evaluation, and system deployment. YOLOv5 was selected due to its strong performance in real-time object detection tasks and its suitability for lightweight applications [36][37].
- Data Collection
Primary data were collected by capturing images of motorcycle parking areas directly in the field. The images were taken from multiple viewing angles to represent real operational conditions, including variations in lighting, parking density, and vehicle orientation. A total of 1,200 images were collected from campus parking areas. This approach ensures that the dataset reflects the actual complexity of motorcycle parking environments in campus areas. The use of real-world datasets is essential because generalized datasets often fail to represent contextual parking conditions accurately [24],[27][28]. Vehicle movement data (inflow and outflow) were collected through direct observation at the parking lot, recording the number of vehicles entering and exiting at hourly intervals. Data were collected over several days of observation and then compiled into daily graphs to illustrate vehicle distribution patterns during each time period. This approach enables an analysis of parking dynamics over time, including the identification of peak hours for vehicle entry and exit.
- Data Annotation and Preprocessing
The collected images were annotated using bounding boxes to label two classes: occupied parking spaces and vacant parking spaces. The annotation process was conducted using the Roboflow platform to ensure consistency and accuracy in labeling. After annotation, the dataset was prepared for model training through preprocessing steps, including image resizing, normalization, and dataset partitioning into training, validation, and testing subsets. Proper dataset preparation is crucial to ensure model robustness and improve detection performance in object detection tasks [35], [38].
- Model Training
The annotated dataset was used to train the YOLOv5 model for detecting motorcycle parking availability. YOLOv5 is widely used for real-time object detection because of its efficient architecture and high detection accuracy [16],[37]. During training, the model learns spatial features and visual patterns associated with occupied and vacant parking spaces. The training process iteratively updates model parameters to minimize detection errors and improve prediction performance. Previous studies have demonstrated that YOLOv5 performs effectively in parking detection and intelligent monitoring applications [39][40]. The model was trained for 100 epochs with an input image size of 640 × 640 pixels and a batch size of 16.
- Model Evaluation
The performance of the trained model was evaluated using standard object detection metrics, including precision, recall, and mean Average Precision (mAP). Precision measures the accuracy of positive detections, recall evaluates the model's ability to detect all relevant objects, and mAP provides an overall assessment of detection performance across different confidence thresholds. These evaluation metrics are widely used to measure the effectiveness of object detection models in intelligent parking systems [35],[41]. Precision is the degree of accuracy between the information requested by the user and the system’s response. The system’s precision score will be expressed as a numerical measure of the information’s accuracy. Here is the precision formula.
| 
| (1) |
Recall is a measure of prediction accuracy used to assess how well a system can retrieve information. Here is the recall formula.
| 
| (2) |
- YOLO
YOLO (You Only Look Once) is one of the most widely used deep learning-based object detection algorithms in the field of computer vision for quickly and accurately detecting and identifying objects in an image or video. Unlike traditional object detection methods that process images in several stages, YOLO works with a single-stage detection approach, which predicts the location of objects (bounding boxes) and object classes directly in a single neural network process. Recent advances in computer vision, particularly You Only Look Once (YOLO) models, have transformed quality control by enabling real-time, high-accuracy detection of fabric defects. Traditional manual fabric inspection is labor intensive and prone to inconsistencies, making it ineffective for modern high-speed production lines [42][43].
- Confusion Matrix and IoU
A confusion matrix is used to evaluate the system’s performance in classifying parking space status. This enables the analysis of errors caused by occlusion or shadows in a crowded parking environment. Additionally, the confusion matrix provides detailed information on the distribution of true positives, false positives, true negatives, and false negatives, thereby helping to identify the most dominant types of errors. The model can be further optimized by adjusting parameters or improving the quality of the dataset to increase detection accuracy [44].
In the evaluation of object detection models, metrics are needed that can accurately measure the precision of predicted locations. Intersection over Union (IoU) is a key metric in object detection used to measure the degree of overlap between predicted bounding boxes and ground truth. A high IoU value indicates that the model’s predictions align well with reality, thereby increasing confidence in the results [45]. The IoU is calculated as follows.
| 
| (3) |
A detection is considered valid if the IoU value exceeds a certain threshold. The use of IoU enables the evaluation of the accuracy of object detection models, particularly in complex environmental conditions such as parking lots with high levels of occlusion. Detection results are evaluated to measure A detection is considered valid if IoU ≥ 0.5. The status of a parking slot is determined based on the overlap between the detected motorcycle object and the predefined parking slot area. A slot is classified as occupied if the overlap meets the threshold, and as empty if it does not.re the degree of agreement between predictions and actual data [45].
- System Deployment
After the training and evaluation stages, the trained YOLOv5 model was integrated into an Android-based mobile application. The application enables users to monitor motorcycle parking availability in real time through image-based detection. The use of lightweight object detection models allows efficient deployment on mobile and embedded systems, which is particularly important for smart parking applications in developing countries with limited infrastructure resources [24],[40],[46]. Figure 1 presents the overall workflow of the proposed model development and evaluation process. The study begins with a literature review to identify relevant theories, previous studies, and technological approaches related to object detection and intelligent parking systems. This stage provides the conceptual foundation for designing the proposed method. Subsequently, data collection is conducted to obtain image datasets representing real motorcycle parking conditions.
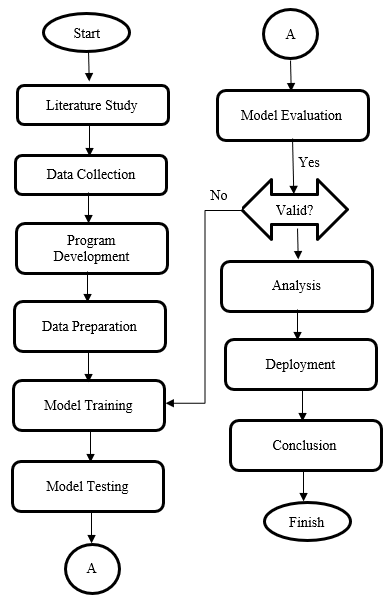
Figure 1. Training Model Stages
After the dataset is obtained, the program development stage is performed to design and implement the detection system framework. The collected data are then processed in the data preparation stage, which includes image preprocessing, annotation, and dataset organization to ensure compatibility with the training algorithm. The prepared dataset is then used in the model training stage, where the detection model is trained to recognize and localize objects within the images. Following the training phase, the model performance is assessed through model testing using a separate testing dataset.
The trained model is then subjected to model evaluation to determine whether its performance satisfies the predefined validation criteria. If the model does not meet the required performance level, the process returns to the training stage for further optimization. Otherwise, the process proceeds to the analysis stage, where the experimental results are interpreted and discussed. Finally, the validated model is implemented in the deployment stage, and the research concludes with the presentation of the main findings and conclusions.
- RESULT AND DISCUSSION
The experimental results demonstrate that the proposed YOLOv5-based detection system is capable of effectively identifying occupied and vacant motorcycle parking spaces under real-world conditions. The model achieved an optimal F1-score of 0.57 and a mean Average Precision (mAP@0.5) of 0.566, indicating a reasonable detection capability considering the complexity of dense motorcycle parking environments. Unlike car parking detection, motorcycle parking areas often exhibit irregular vehicle orientation, high parking density, and frequent occlusion between vehicles, which significantly increase the difficulty of accurate detection. The integration of a context-aware dataset consisting of 1,200 real-world images collected from campus parking areas enables the model to learn more realistic visual patterns compared to approaches that rely on general datasets such as COCO. This context-specific dataset improves the model’s adaptability to real operational environments, particularly under varying lighting conditions and crowded parking scenarios
- Parking Detection
The analysis of two-wheeled motor vehicle movements plays an important role in understanding traffic dynamics within a given area. To illustrate the patterns of vehicle entry and exit during the observation period, the data are presented in graphical form. These graphs aim to depict the distribution of incoming and outgoing vehicles over specific time intervals across five consecutive days. Through this visualization, fluctuations in vehicle volume for each period can be observed, serving as the basis for identifying peak intensity hours. Figure 2 and Figure 3 illustrate the entry and exit patterns of vehicles, which are subsequently analyzed to provide a general overview of daily traffic flow.
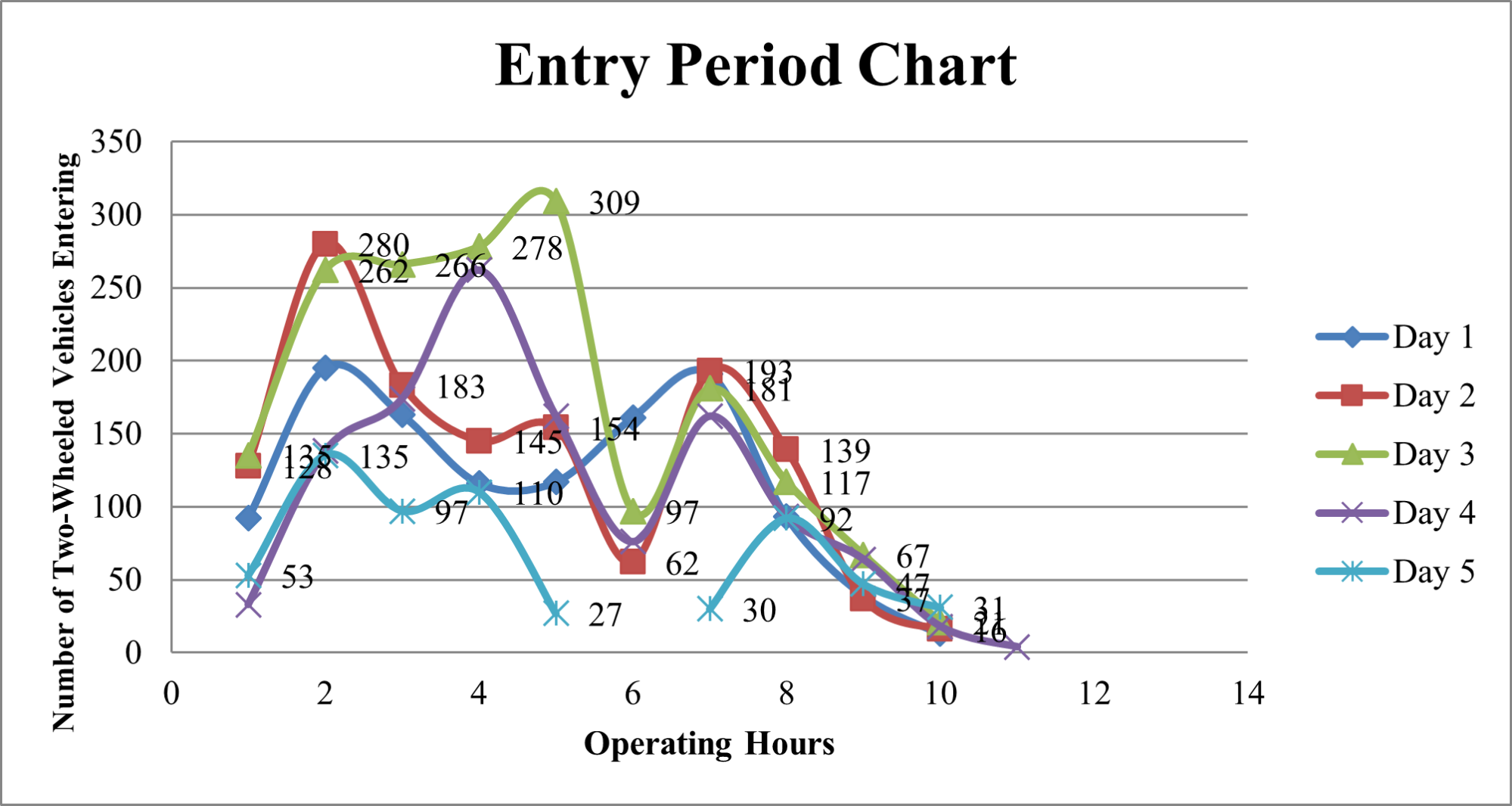
Figure 2. Motorcycle Entry Period Chart
Figure 2 illustrates the number of two-wheeled motor vehicles entering the observation site during each time interval over five consecutive days. The data show that most vehicles entered during the early to midday periods, with the highest peak occurring on Day 3 during Period 6, reaching 309 vehicles. Day 2 also recorded a significant surge in Period 2 with 280 vehicles, followed by a sharp decline in the subsequent periods. This pattern indicates that vehicle inflow is highest in the morning, likely coinciding with the start of work hours or operational activities.
Figure 3 presents the number of vehicles exiting the observation site during the same periods. Unlike the entry pattern, the number of exiting vehicles tends to increase during the mid-to late-day intervals. The highest peak occurred on Day 2 during Period 11, with 430 vehicles exiting—significantly higher than on other days. Day 3 and Day 4 exhibited relatively stable patterns, with vehicle exits evenly distributed from Period 6 to Period 11. Day 5 recorded the lowest vehicle exit volume, which may be attributed to reduced activity or the occurrence of a public holiday.
Based on the two graphs, a clear difference is observed between peak times of vehicle entry and exit. Inflow is more dominant in the morning to midday, while outflow rises towards the late afternoon and evening. This information is essential for traffic management planning, particularly in allocating parking capacity and regulating vehicle entry and exit to prevent congestion during peak hours.
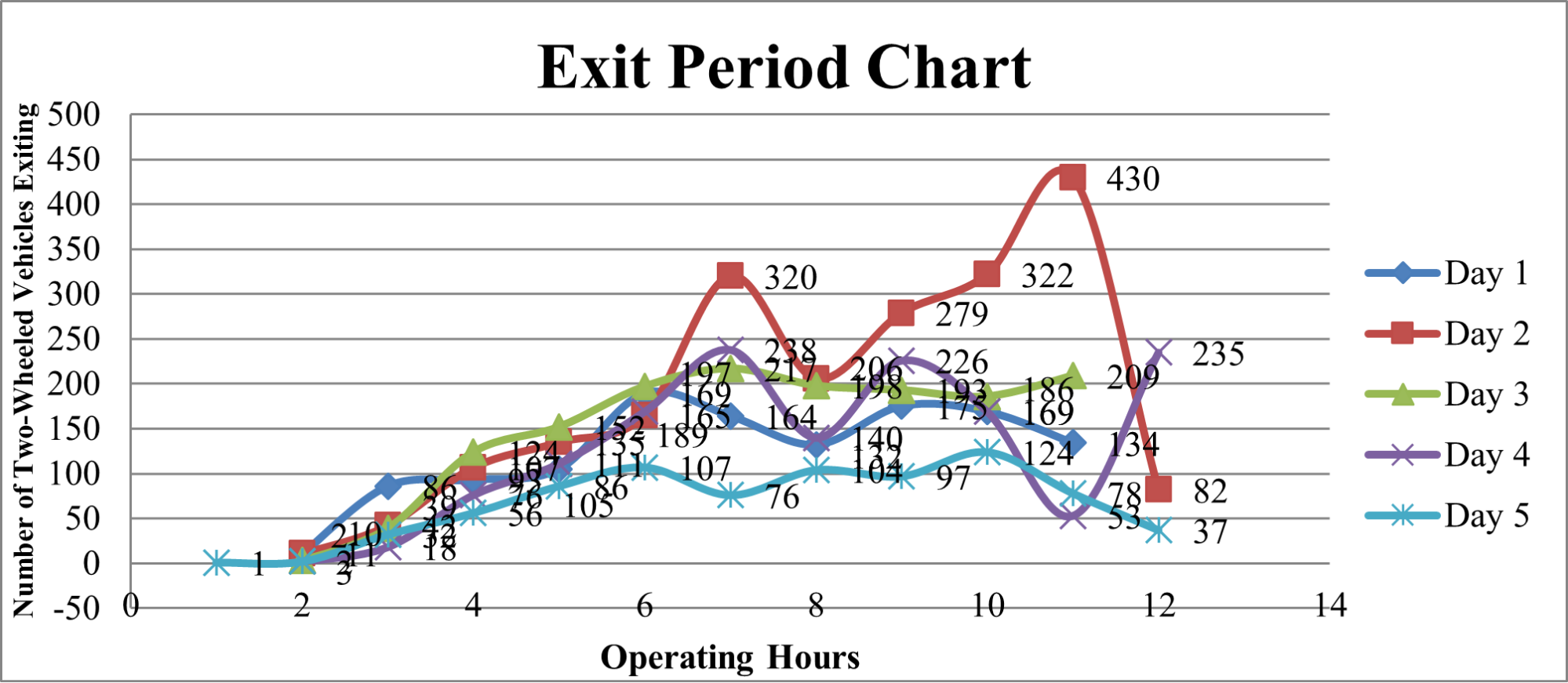
Figure 3. Motorcycle Exit Period Chart
- Object Detection with Data Validation
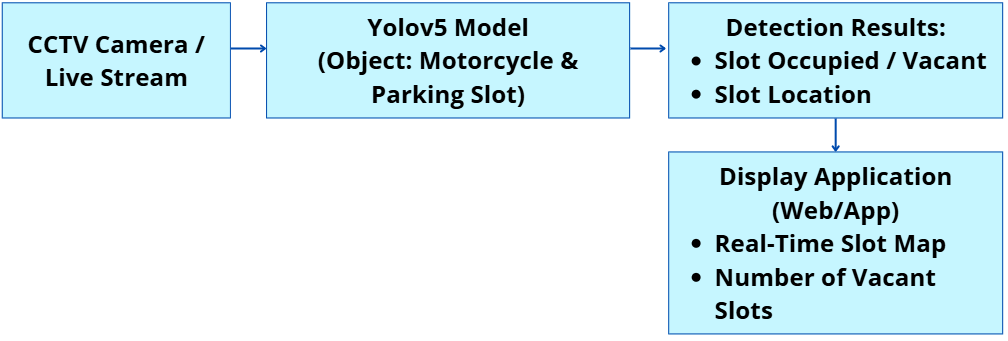
The validation of the parking detection model in the campus environment was carried out by evaluating the system’s performance in recognizing parking areas based on a dataset that had been compiled and processed using the Roboflow platform. The validation data consisted of a set of parking area images that were not included in the training set but still represented real-world conditions in the field. To illustrate the overall system workflow, a schematic of the YOLOv5-based motorcycle parking availability detection system was developed, encompassing the stages from image acquisition to the detection process and result visualization can be seen in Figure 4.
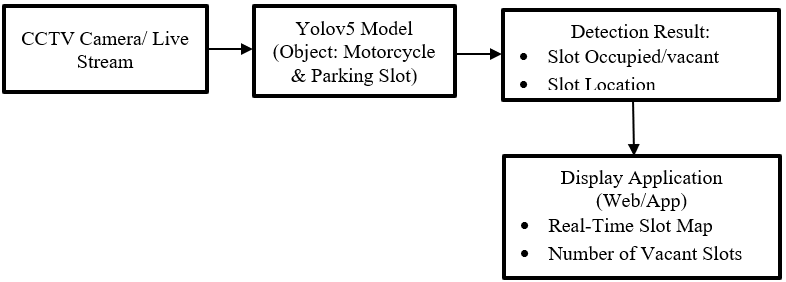
Figure 4. Parking Space Detection System Scheme with YOLOv5
The Roboflow-trained object detection model accurately identified vacant and occupied parking slots, demonstrating high precision and consistency in the validation images. These results suggest its potential for real-world application. Testing in the campus environment was conducted in three sessions, with the first session performed in the morning, as shown in Figure 5. Based on Figure 5, the detection results reflect the peak parking activity within the campus area. The model successfully detected 9 occupied parking slots (indicated by blue bounding boxes) and 10 vacant slots (indicated by yellow bounding boxes). This demonstrates that vehicle density in the morning reaches its maximum level, coinciding with the start of academic and operational activities on campus. Meanwhile, the detection results during the midday session revealed significant changes in parking occupancy patterns compared to the morning session. A further comparison can be observed in Figure 6, which represents the parking conditions at midday.
Based on Figure 6, the detection results during the midday session show a significant decrease in the number of parked vehicles compared to the morning session. The system identified only 1 occupied parking slot (indicated by a blue bounding box) and 9 vacant slots (indicated by yellow bounding boxes). This indicates that at midday, the parking area density is much lower, likely due to reduced campus activities or the lunch break period.
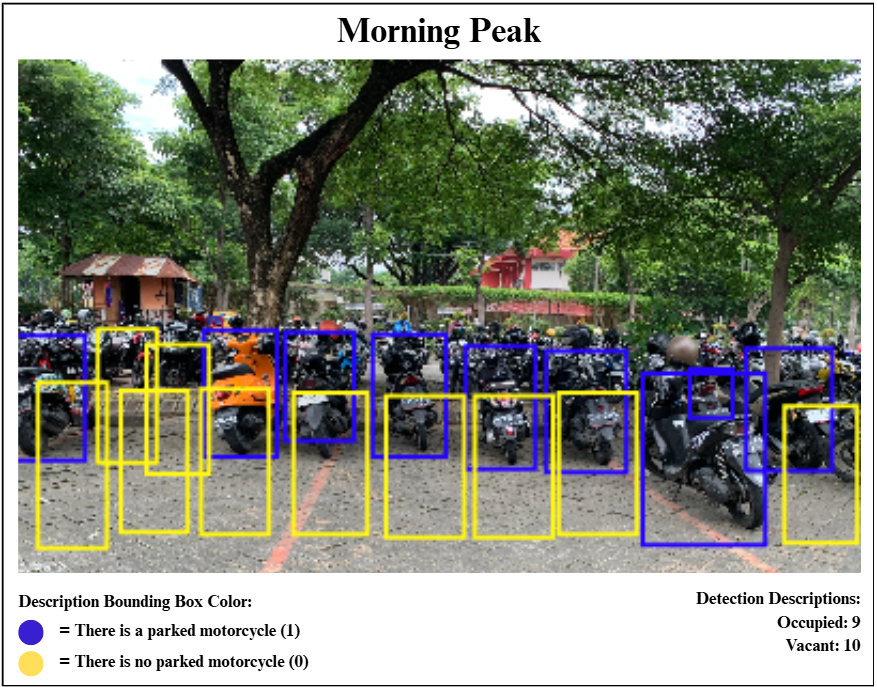
Figure 5. Object Detection in the Morning
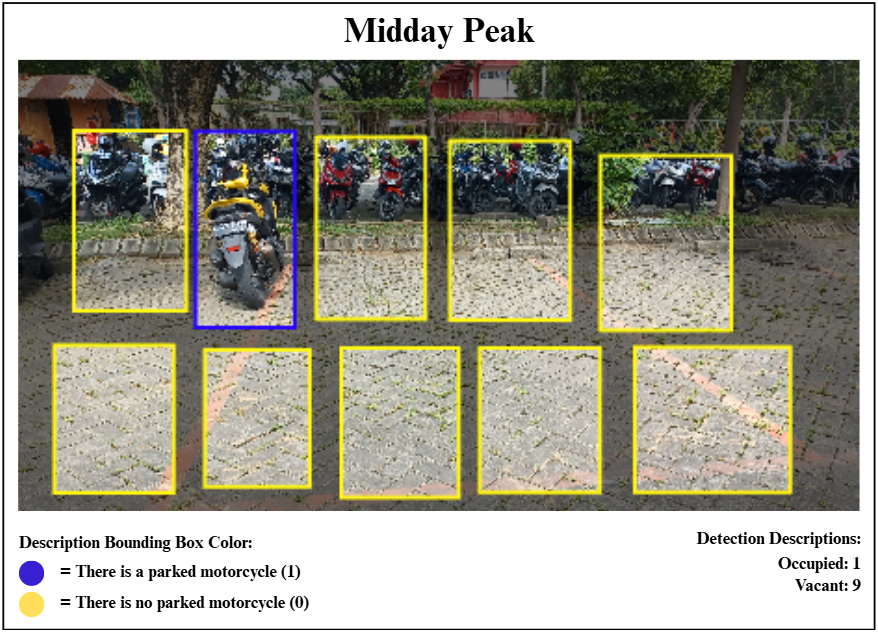
Figure 6. Object Detection During the Day
Based on Figure 7, the detection results in the afternoon session within the campus area show that the system successfully identified 6 occupied parking slots (indicated by blue bounding boxes) and 4 vacant slots (indicated by yellow bounding boxes). This condition reflects a renewed increase in the number of parked vehicles after the significant decrease observed during the midday session, which is likely influenced by additional lectures or other afternoon activities. Despite the relatively high parking density, the model consistently demonstrated strong performance in recognizing vehicle objects and accurately distinguishing them from vacant areas. This highlights the model’s good generalization ability under complex visual conditions, including changes in lighting and dynamic background environments.
Nevertheless, to quantitatively confirm the reliability of the system, a comprehensive evaluation based on performance metrics is required. In the context of a parking availability detection system, metrics such as confidence, precision, and recall are crucial in assessing the accuracy and effectiveness of model predictions. Confidence reflects the system’s level of certainty in each detection, ensuring that only highly confident predictions are retained to minimize misinformation. Precision evaluates how accurately positive predictions correspond to actual conditions, for example, when a slot predicted as vacant is indeed vacant—an essential factor to avoid misleading data. Meanwhile, recall measures the system’s ability to detect all truly available vacant parking slots, ensuring that no potential information is overlooked. These three metrics complement each other and form the foundation for evaluating the success of the detection model, as well as determining its feasibility for implementation in real-world operational scenarios.
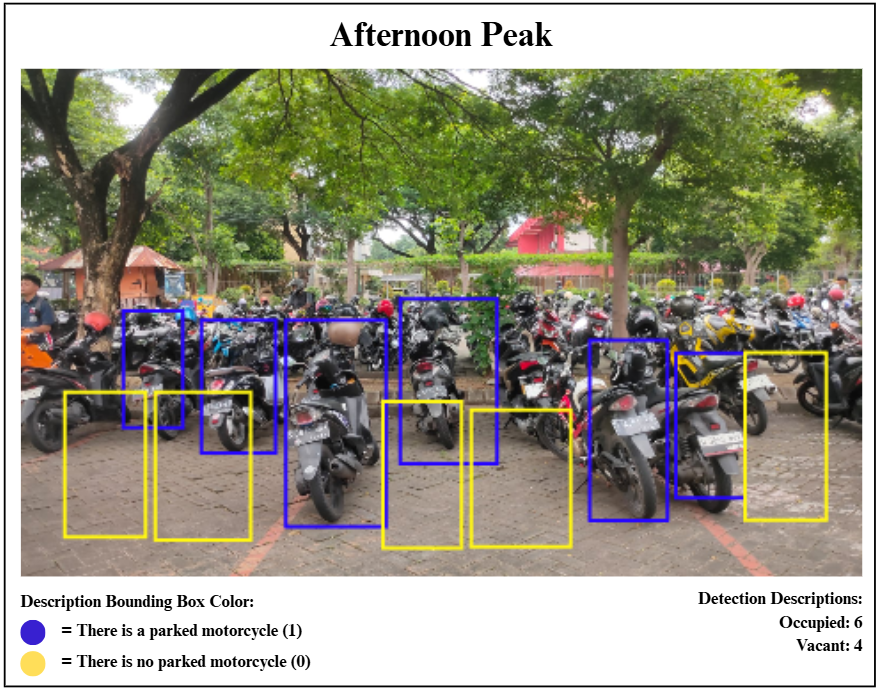
Figure 7. Object Detection in the Afternoon
- Confusion Matrix
A confusion matrix was chosen because it provides a more comprehensive view of the relationship between predictions and actual conditions than a single metric such as accuracy. Evaluation metrics such as precision and recall describe the system’s performance. The evaluation was conducted across three main classes empty, filled, and background to identify the accuracy levels and types of errors that occurred during the detection process. Based on Figure 8 shown, it appears that the model performs quite well in classifying the empty and filled classes, with m=true positive rates of 0.84 and 0.86, respectively. This indicates that the model is able to recognize the visual patterns of these two classes with relative consistency.
However, there are still significant classification errors, particularly in the distribution of predictions for the background class. Values of 0.37 and 0.63 indicate a tendency for the model to associate objects with the background, suggesting ambiguity in visual features or disturbances such as shadows and occlusion. Additionally, the error rate of 0.11 for the background class indicates that some objects are not detected properly or are not classified into the correct category.
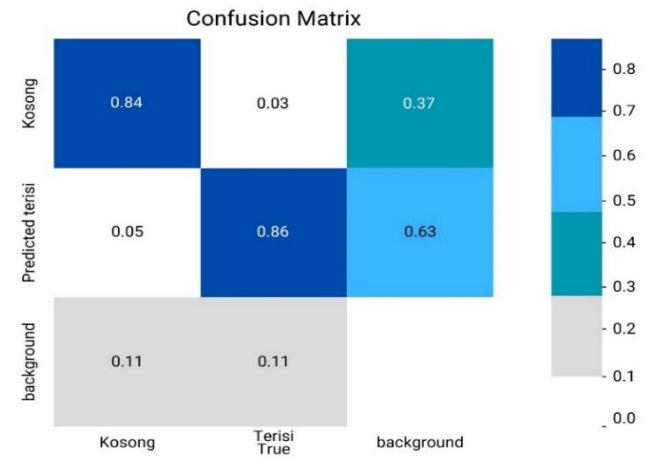
Figure 8. Confusion Matriks
- F1-Confidence Curve Detection Results
Confidence represents the level of certainty of the model regarding the detection results it produces. The F1-Confidence outcomes are presented in the Figure 9. Figure 9 illustrates the F1–Confidence curve of the YOLOv5-based motorcycle parking availability detection model, which demonstrates its best performance with the highest F1-score of 0.57 at a confidence threshold of 0.294. This point represents the optimal balance between precision and recall, where the system is able to recognize objects accurately without sacrificing too many true detections. The blue curve, which represents the aggregated performance across all classes, exhibits a smooth progression without steep drops, reflecting the model’s stability against changes in the threshold value—an important capability for adaptation in real-world inference conditions. Meanwhile, the gray lines depict the class-wise F1 performance distribution, which generally falls below the average curve, indicating that certain classes remain challenging to detect optimally. This limitation is likely caused by class imbalance in the dataset or visual similarities between objects that confuse the model. Nevertheless, the stability of the blue curve confirms that, overall, the model remains robust and reliable, making it well-suited for dynamic and complex detection scenarios.
When compared to previous studies, the advantages of this approach become more evident. For instance, Lin & Zhu (2024) applied YOLOv5 for vehicle detection in complex urban environments and reported improved accuracy, but their work did not provide an in-depth F1-confidence analysis [47]. Similarly, Hidayah et al. (2024), who integrated YOLOv5 and OpenCV into an intelligent parking system, achieved a mean Average Precision (mAP) of approximately 0.95, yet without considering the precision–recall trade-off as explicitly as the F1-confidence curve [41]. By complementing the mAP metric with the F1-score, this study offers a more comprehensive evaluation of the model’s robustness—not only in terms of average precision but also in maintaining high recall across varying thresholds.
Overall, this approach highlights a clear advantage: beyond achieving accuracy levels comparable to Hidayah et al. (mAP ≈ 0.95), the present study contributes a deeper evaluation through the F1-confidence curve. This enables the determination of an optimal threshold for real-world deployment, making the proposed “Motorcycle Parking Availability Detection Using YOLOv5” not only strong in accuracy but also adaptive and ready for practical implementation based on transparent and reliable performance metrics.
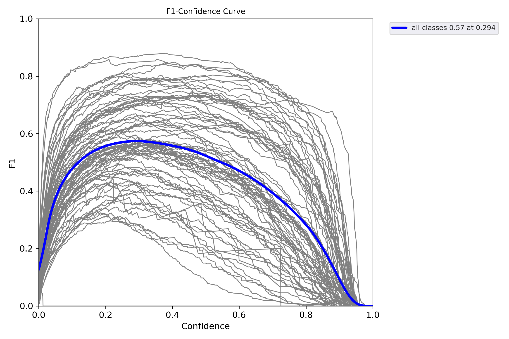
Figure 9. F1-Confidence Detection Chart
- Precision–Recall Detection Results
The precision–recall graph is presented per class, showing the variation in detection performance across different classes. The following figure illustrates the precision–confidence results in the Figure 10. Figure 10 presents the Precision–Recall graph per class, representing the performance of the YOLOv5-based motorcycle parking detection model. The blue curve illustrates the aggregate performance across all classes, achieving a mean Average Precision (mAP) of 0.566 at an IoU threshold of 0.5, which reflects a reasonably good performance for a model at the initial development stage. The gradual and smooth decline of the blue curve from the top-left to the bottom-right indicates that the model is able to maintain a high precision level even as recall increases, suggesting stable performance in object detection. Such a curve pattern is a positive indicator that the detection system is not easily prone to prediction errors when the detection coverage expands. Meanwhile, the gray lines depict the performance variation across individual classes, where some lines drop sharply, indicating that certain classes suffer significant declines in precision. This phenomenon may be caused by imbalanced training data distribution or visual characteristics of certain classes that are harder to recognize. Nevertheless, the majority of classes still show performance within an acceptable tolerance range, demonstrating that the model generally possesses strong generalization ability under diverse visual conditions in real-world environments.
When compared to previous studies, the superiority of this model becomes even more apparent. For instance, the study by Chen et al. (2023), which developed a vehicle detection system using YOLOv5 in open urban parking areas, reported an mAP of 0.52 with high dependency on specific lighting conditions and limitations in detecting objects at extreme angles [15]. While this study achieves an mAP@0.5 of 0.566. Although this difference indicates a marginal increase in detection performance, it is relatively small and may not be statistically significant. Moreover, differences in dataset characteristics, environmental conditions, and evaluation settings may influence the results, making direct comparison less conclusive. Therefore, rather than indicating clear superiority, the findings suggest that the proposed model performs comparably while maintaining stable detection under varying lighting conditions and high vehicle density scenarios, including during peak parking periods.
Thus, the combination of performance metrics and curve visualization makes this approach more robust and well-prepared for implementation in intelligent parking solutions based on computer vision in both campus and public environments.
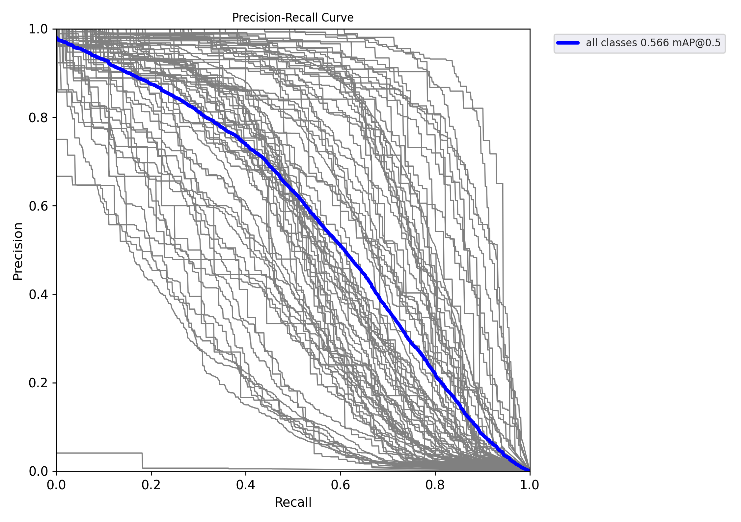
Figure 10. Precision-Recall Detection Graph
- Precision–Confidence Detection Results
Confidence represents the model’s level of certainty in detecting an object, while Precision refers to the accuracy of the model’s predictions at a given confidence threshold. The following figure illustrates the Precision–Confidence results in the Figure 11. Figure 11 presents the Precision–Confidence curve of the detection model in the study “Motorcycle Parking Availability Detection Based on YOLOv5.” The thick blue line represents the average precision across all classes against varying confidence thresholds. The model achieves perfect precision of 1.00 at a confidence level of 0.978, indicating that every prediction above this threshold is entirely accurate with no false positives. However, this high threshold may reduce recall, since many lower-quality detections are disregarded.
At the lower end of the curve, where confidence values are small, precision is also relatively low showing that the model makes more detection errors due to being overly permissive in accepting predictions. As confidence increases, the curve demonstrates a steady and expected upward trend: the higher the model’s confidence in its detections, the more accurate the outcomes. The gray lines dispersed along the curve represent the precision distribution of individual object classes. While most follow a similar upward pattern, some fluctuations occur at higher thresholds, a common effect caused by reduced detection samples at extreme confidence values. Overall, the curve highlights the model’s stability and robustness in maintaining prediction accuracy, while also providing flexibility in threshold adjustment during deployment without the risk of severe performance degradation.
In summary, the model in this study not only achieves maximum precision but also sustains it consistently across a wide range of thresholds demonstrating a more superior and adaptive performance compared to earlier works. This curve reinforces that a YOLOv5-based approach can be relied upon for intelligent parking systems, where maintaining high-precision predictions at elevated confidence levels is crucial for delivering accurate and responsive user experiences.
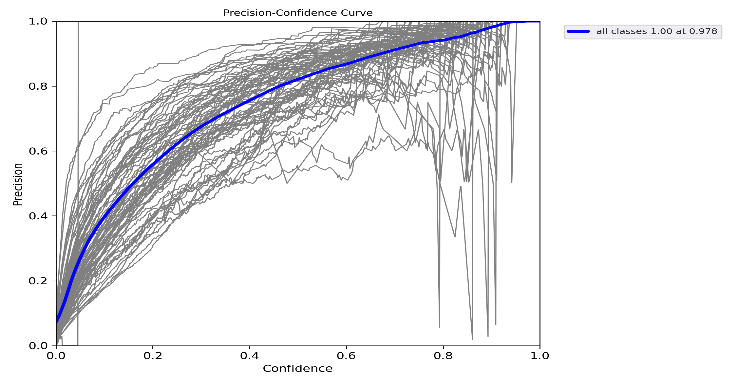
Figure 11. Precision-Confidence Detection Chart
- Recall–Confidence Detection Results
Recall represents the proportion of actual objects that are successfully detected by the model. The following Figure 12 presents the recall–confidence curve obtained from the detection results. Figure 12 shows the Recall–Confidence curve of the YOLOv5-based motorcycle parking detection model. The curve indicates that recall reaches 0.81 at a confidence threshold of 0.0, meaning that the model detects 81% of the total ground-truth objects when all predictions are considered. As the confidence threshold increases, recall gradually decreases, reflecting the expected trade-off between recall and precision. The gray curves represent class-level recall variations. Most classes follow a smooth downward trend, while several classes exhibit steeper declines, suggesting potential dataset imbalance or more complex visual characteristics. Compared with previous studies, the results suggest relatively stable recall behavior across threshold variations, which is beneficial for real-world parking monitoring systems.
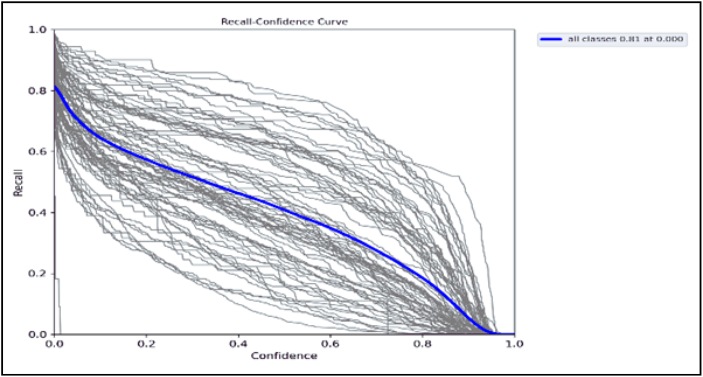
Figure 12. Recall-Confidence Detection Graph
When compared with previous studies, the results of this study indicate relatively stable recall behavior across different confidence thresholds. For example, Yu and Liu (2023), in the context of license plate recognition for intelligent parking systems, reported an initial recall close to 0.95, followed by a sharp decrease after a confidence threshold of 0.3, indicating sensitivity to threshold adjustments [48]. In contrast, the YOLOv5 model in this study starts with a recall of 0.81 but demonstrates a more gradual decline as the confidence threshold increases. Similarly, Alam et al. (2025), who combined YOLOv5 with fisheye camera calibration for vehicle detection, reported recall values close to 0.90; however, the study did not provide detailed analysis of the Recall–Confidence relationship [22]. By presenting Recall–Confidence analysis, this study offers additional insight into how detection performance changes across different threshold settings. Such analysis is important for evaluating the practical reliability of object detection systems in real-world parking environments [49].
The experimental results demonstrate that the proposed YOLOv5-based detection system is capable of identifying occupied and vacant motorcycle parking spaces under real operational conditions. The detection performance achieved in this study (F1-score = 0.57 and mAP@0.5 = 0.566) indicates that the model is able to handle the complexity of dense motorcycle parking environments. Unlike car parking areas, motorcycle parking spaces often involve irregular vehicle orientation, high parking density, and frequent occlusion between vehicles, which significantly increase the difficulty of accurate detection. Despite these challenges, the proposed system maintains stable performance and provides reliable real-time parking availability information through mobile-based monitoring.
However, further improvements are needed before full-scale deployment. These include expanding the size and diversity of the dataset to better capture variations in lighting and parking conditions, implementing advanced data augmentation techniques, and improving the quality of annotations to reduce labeling inconsistencies. Additionally, model optimization—such as hyperparameter tuning or the implementation of newer YOLO variants—can improve detection accuracy and recall. Evaluating the system across various devices and integrating performance metrics such as FPS stability and statistical variability will also strengthen its readiness for real-world implementation.
- Common Failure Modes
Several common failure modes were observed during testing. First, occlusion between closely parked motorcycles often causes missed detections (false negatives) [50], particularly in high-density parking conditions. Second, strong shadows and non-uniform lighting can lead to misclassification between occupied and vacant slots. Third, unusual motorcycle orientations or partial visibility at the edge of the frame may reduce detection accuracy. Additionally, background elements with similar visual features to motorcycles can occasionally trigger false positives. These limitations highlight the need for improved dataset representation and model robustness to handle complex real-world scenarios [51].
To address these failure modes, several mitigation strategies can be considered. Incorporating more diverse training data that explicitly includes occlusion scenarios, extreme lighting conditions, and varied motorcycle orientations can improve model generalization [52]. Additionally, applying advanced augmentation techniques such as brightness adjustment, shadow simulation, and random cropping may help the model become more robust to environmental variations. Post-processing methods, including temporal smoothing across video frames or combining detection with tracking algorithms, can also reduce false detections and improve consistency in real-time applications.
- CONCLUSIONS
This study developed a real-time motorcycle parking availability detection system based on the YOLOv5 object detection framework to address the increasing challenges of parking management in motorcycle-dominated environments. The model achieves an F1-score of 0.57 and mAP@0.5 of 0.566, indicating moderate performance. However, the moderate F1-score and mAP indicate that the model still faces limitations in balancing precision and recall, particularly under conditions of high density, occlusion, and background interference, as also reflected in the confusion matrix and recall–confidence analysis.
Although a precision value of 1.00 is achieved at a high confidence threshold of 0.978, this setting is not practically optimal due to reduced recall. In practice, lower thresholds provide a better balance but may introduce detection errors, affecting reliability during peak parking conditions.
Dari sisi implementasi, penggunaan YOLOv5 pada perangkat mobile menunjukkan keseimbangan yang baik antara akurasi dan efisiensi komputasi. The system is capable of operating in near-real-time, making it a viable solution for smart parking systems in environments with limited infrastructure. As indicated by the confusion matrix results, the model demonstrates fairly good detection capabilities; however, there is still room for improvement, particularly in reducing errors caused by complex environmental conditions. Improving the quality of the dataset and optimizing the model are necessary to enhance the system’s robustness against variations in real-world conditions. Additionally, potential privacy issues—such as the capture of faces or vehicle license plates—must be addressed; therefore, protective measures such as anonymization are recommended for future research.
From a deployment perspective, the current performance is not yet sufficient for large-scale implementation. Future work should focus on expanding the dataset (≥ 3,000–5,000 images), improving annotation quality, and enhancing model robustness, particularly for occlusion handling and diverse environmental conditions. Overall, this study provides an initial step toward intelligent motorcycle parking detection, but further improvements are required to achieve reliable real-world deployment.
ACKNOWLEDGEMENT
The authors would like to express their sincere gratitude to the Faculty of Vocational Studies, Universitas Negeri Surabaya, for the support and facilities provided throughout this research. Special thanks also go to all team members who contributed to the development and field testing of the prototype. This research was successfully completed with the guidance and encouragement of supervisors and reviewers who provided valuable insights during the study.
REFERENCES
- G. Yaldi, I. M. Nur, Apwiddhal, and Momon, “Analysing Young Motorcyclist Trip and Parking Behaviours: A Strategy to Reduce Motorcycle Accident Numbers,” Int. J. Adv. Sci. Eng. Inf. Technol., vol. 13, no. 2, pp. 477–486, 2023, https://doi.org/10.18517/ijaseit.13.2.16407.
- J. E, M. Noerrachman, and A. Saripudin, “Review of: Design of a Smart Motorcycle Parking System based on Wireless Sensor Network (WSN) in a Multilevel Building at Universitas Pendidikan Indonesia,” Qeios, no. 207, pp. 1–16, 2024, https://doi.org/10.32388/4jpba0.
- W. Sulistyarso, “Motorcycle Parking Capacity Analysis Around Unikom Campus, Jalan Dipatiukur, Bandung City,” J. Dev. Integr. Eng., vol. 3, no. 2, pp. 95–106, 2023, https://doi.org/10.17509/jodie.v3i2.55741.
- E. F. Wicaksono, E. Hidayah, and C. A. Fildzah, “Bioretention Design Simulation for Efficient Urban Stormwater Reduction,” J. Civ. Eng. Forum, vol. 11, no. 1, pp. 69–78, 2025, https://doi.org/10.22146/jcef.12806.
- P. J. Romadhona, R. Liu, and C. Balijepalli, “The effect of motorcycle park-and-ride on the performance of Transit-Oriented Development and transit ridership: a case study of Greater Jakarta,” Travel Behav. Soc., vol. 41, no. September 2024, p. 101092, 2025, https://doi.org/10.1016/j.tbs.2025.101092.
- N. M. Zafri, A. Khan, S. Jamal, and B. M. Alam, “Impact of COVID-19 pandemic on motorcycle purchase in Dhaka, Bangladesh,” Frontiers in future transportation, vol. 2, p. 646664, 2021, https://doi.org/10.3389/ffutr.2021.646664.
- A. Ahad and F. A. Kidwai, “Comprehensive Analysis Of Urban Vehicle Parking Challenges: A Comprehensive Survey Of Delhi,” Int. J. Creat. Res. Thoughts, vol. 11, no. 12, pp. 649–657, 2023, https://ijcrt.org/papers/IJCRT2312302.pdf
- W. Chen, Y. Tian, Y. Wang, H. Yan, and Y. Wang, “Cause Identification and Coupling Relationship Analysis of Urban Problems: A Case Study of Poor Parking Convenience,” Buildings, vol. 14, no. 2, 2024, https://doi.org/10.3390/buildings14020516.
- M. Uche-Soria, B. Tabuenca, G. Halcón-Gibert, and Y. Núñez-Guerrero, “Quantifying and Forecasting Emission Reductions in Urban Mobility: An IoT-Driven Bike-Sharing Analysis,” Sensors, vol. 25, no. 7, pp. 1–24, 2025, https://doi.org/10.3390/s25072163.
- J. S. Olmos Medina, J. G. Maradey Lázaro, A. Rassõlkin, and H. González Acuña, An Overview of Autonomous Parking Systems: Strategies, Challenges, and Future Directions, vol. 25, no. 14. 2025. https://doi.org/10.3390/s25144328.
- D. L. Nguyen, X. T. Vo, A. Priadana, and K. H. Jo, “YOLO5PKLot: A Parking Lot Detection Network Based on Improved YOLOv5 for Smart Parking Management System,” Commun. Comput. Inf. Sci., vol. 1857, pp. 95–106, 2023, https://doi.org/10.1007/978-981-99-4914-4_8.
- J. Bhowmik, M. F. Monir, S. A. Al Naiyem, M. A. Rahman, B. Bhowmik, and T. Ahmed, “Design and Development of a Low-Cost Automated Parking System for Developing Countries,” EUROCON 2023 - 20th Int. Conf. Smart Technol. Proc., no. July, pp. 30–35, 2023, https://doi.org/10.1109/EUROCON56442.2023.10198976.
- S. Yan, N. E. OConnor, and M. Liu, “U-Park: A User-Centric Smart Parking Recommendation System for Electric Shared Micromobility Services,” IEEE Trans. Artif. Intell., vol. 5, no. 10, pp. 5179–5193, 2024, https://doi.org/10.1109/TAI.2024.3428513.
- S. H. Lee, S. H. Oh, and J. G. Kim, “YOLOv5-Based Electric Scooter Crackdown Platform,” Appl. Sci., vol. 15, no. 6, 2025, https://doi.org/10.3390/app15063112.
- Z. Chen, X. Wang, W. Zhang, G. Yao, D. Li, and L. Zeng, “Autonomous Parking Space Detection for Electric Vehicles Based on Improved YOLOV5-OBB Algorithm,” World Electr. Veh. J., vol. 14, no. 10, 2023, https://doi.org/10.3390/wevj14100276.
- M. Hussain, “YOLOv5, YOLOv8 and YOLOv10: The Go-To Detectors for Real-time Vision,” arXiv preprint arXiv:2407.02988, 2024, https://doi.org/10.48550/arXiv.2407.02988.
- N. Bachir and Q. A. Memon, “Benchmarking YOLOv5 models for improved human detection in search and rescue missions,” J. Electron. Sci. Technol., vol. 22, no. 1, p. 100243, 2024, https://doi.org/10.1016/j.jnlest.2024.100243.
- C. Zhang, “Car detection algorithm in urban based on YOLOv5,” Appl. Comput. Eng., vol. 88, no. 1, pp. 245–251, 2024, https://doi.org/10.54254/2755-2721/88/20241768.
- A. S. Geetha, “Comparing YOLOv5 Variants for Vehicle Detection: A Performance Analysis,” arXiv preprint arXiv:2408.12550, pp. 1–18, 2024, https://doi.org/10.48550/arXiv.2408.12550.
- J. Cao, X. Zheng, Y. Lyu, J. Wang, R. Xu, and L. Wang, “Chasing Day and Night: Towards Robust and Efficient All-Day Object Detection Guided by an Event Camera,” Proc. - IEEE Int. Conf. Robot. Autom., pp. 9026–9032, 2024, https://doi.org/10.1109/ICRA57147.2024.10611705.
- B. G. Mesfin, Z. Li, D. Sun, D. Chen, and Y. Xi, “Urban traffic-parking system dynamics model with macroscopic properties: a comparative study between Shanghai and Zurich,” Humanit. Soc. Sci. Commun., vol. 11, no. 1, pp. 1–13, 2024, https://doi.org/10.1057/s41599-024-02959-w.
- M. J. Alam et al., “An Optimized YOLOv5 Based Approach For Real-time Vehicle Detection At Road Intersections Using Fisheye Cameras,” arXiv preprint arXiv:2502.04566, 2025, https://doi.org/10.48550/arXiv.2502.04566.
- A. N. Faturrohman, S. H. Suryawan, and A. Rahim, “Development of a Classification Model for Vehicles Entering and Leaving Parking Areas Using the YOLOv8 Algorithm,” Technique, vol. 13, no. 3, pp. 370–379, 2024, https://doi.org/10.34148/teknika.v13i3.992.
- C. Wei, Z. Tan, Q. Qing, R. Zeng, and G. Wen, “Fast Helmet and License Plate Detection Based on Lightweight YOLOv5,” Sensors, vol. 23, no. 9, pp. 1–21, 2023, https://doi.org/10.3390/s23094335.
- G. Manju and V. A. Binson, “Automated Disease Detection in Silkworms Using Machine Learning Techniques,” Adv. Sustain. Sci. Eng. Technol., vol. 6, no. 4, pp. 1–10, 2024, https://doi.org/10.26877/asset.v6i4.965.
- L. H. Aguswandi, B. K. Triwijoyo, and G. H. Martono, “Smart Parking Space Detection Using Advanced Deep Learning Techniques,” J. Artif. Intell. Softw. Eng., vol. 5, no. 1, p. 198, 2025, https://doi.org/10.30811/jaise.v5i1.6473.
- A. Sukaca, D. H. U. Ningsih, and E. Zuliarso, “Smart Parking System Optimization Using the YOLO Method and A* Algorithm,” Progress. Sci. J. Comput. Sci., vol. 20, no. 2, p. 852, 2024, https://doi.org/10.35889/progresif.v20i2.2113.
- R. Setiyana, H. Nasbey, and H. Suhendar, “Object Detection-Based Vehicle Counting Using the Yolov4-Tiny Algorithm,” Proc. Natl. Phys. Semin., vol. XIII, pp. 102–107, 2024. https://doi.org/10.21009/03.1301.FA14.
- Haerudin, A. R. Hudjimartsu, S. A. and Hermawan. E. “Deteksi Pelanggaran Lalu Lintas Kendaraan Bermotor Roda Dua Menggunakan Metode Convolutional Neural Network Wilayah Kota Bogor,” JATI, vol. 9, no. 3, pp. 4304–4309, 2025. https://doi.org/10.36040/jati.v9i3.13654.
- A. Bochkovskiy, C.-Y. Wang, and H.-Y. M. Liao, “YOLOv4: Optimal Speed and Accuracy of Object Detection,” arXiv preprint arXiv:2004.10934, 2020, https://doi.org/10.48550/arXiv.2004.10934.
- C. Y. Wang, A. Bochkovskiy, and H. Y. M. Liao, “Scaled-yolov4: Scaling cross stage partial network,” Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit., pp. 13024–13033, 2021, https://doi.org/10.1109/CVPR46437.2021.01283.
- G. P. C. P. da Luz, G. M. Sato, L. F. G. Gonzalez, and J. F. Borin, “Smart Parking with Pixel-Wise ROI Selection for Vehicle Detection Using YOLOv8, YOLOv9, YOLOv10, and YOLOv11,” Internet of Things, p. 101858, 2025, https://doi.org/10.48550/arXiv.2412.01983.
- A. Susanti et al., “Application of the Orangutan Optimization Algorithm for Solving Vehicle Routing Problems in Sustainable Transportation Systems,” Eng. Technol. Appl. Sci. Res., vol. 15, no. 3, pp. 22915–22922, 2025, https://doi.org/10.48084/etasr.10545.
- Y. Wang et al., “Lightweight Vehicle Detection Based on Improved YOLOv5s,” Sensors, vol. 24, no. 4, 2024, https://doi.org/10.3390/s24041182.
- B. Benjdira, A. Koubaa, W. Boulila, and A. Ammar, “Parking Analytics Framework using Deep Learning,” Proc. - 2022 2nd Int. Conf. Smart Syst. Emerg. Technol. SMARTTECH 2022, pp. 200–205, 2022, https://doi.org/10.1109/SMARTTECH54121.2022.00051.
- S. K. Jaiswal and R. Agrawal, “A Comprehensive Review of YOLOv5: Advances in Real-Time Object Detection,” Int. J. Innov. Res. Comput. Sci. Technol., vol. 12, no. 3, pp. 75–80, 2024, https://doi.org/10.55524/ijircst.2024.12.3.12.
- R. Khanam and M. Hussain, “What is YOLOv5: A deep look into the internal features of the popular object detector,” arXiv preprint arXiv:2407.20892, 2024, http://arxiv.org/abs/2407.20892
- A. O. Elfaki, W. Messoudi, A. Bushnag, S. Abuzneid, and T. Alhmiedat, “A Smart Real-Time Parking Control and Monitoring System,” Sensors, vol. 23, no. 24, 2023, https://doi.org/10.3390/s23249741.
- D. L. Nguyen, X. T. Vo, A. Priadana, and K. H. Jo, “Car Detection for Smart Parking Systems Based on Improved YOLOv5,” Vietnam J. Comput. Sci., vol. 11, no. 2, pp. 195–209, 2024, https://doi.org/10.1142/S2196888823500185.
- H. Feng, G. Mu, S. Zhong, P. Zhang, and T. Yuan, “Benchmark Analysis of YOLO Performance on Edge Intelligence Devices,” Cryptography, vol. 6, no. 2, pp. 1–16, 2022, https://doi.org/10.3390/cryptography6020016.
- A. Hidayah, S. Zuhriyah, B. E. W. Asrul, Yuyun, and E. Prakasa, “Integration of YOLOv5 Algorithm and OpenCV in Innovative Smart Parking Management Approach,” RESTI J., vol. 8, no. 3, pp. 413–422, 2024, https://doi.org/10.29207/resti.v8i3.5728.
- M. Makara, H. Min, “YOLO Object Detection for Real-Time Fabric Defect Inspection in the Textile Industry: A Review of YOLOv1 to YOLOv11,” Sensors, vol. 25, no. 7, p. 2270, 2025, https://doi.org/10.3990/s25072270.
- Z. Lei, M. Bingya, D. Yanyan, Y. Zhewen and L. Fan, “DCFE-YOLO: A novel fabric defect detection method” PLOS ONE, vol. 20, no. 1, p. e0314525, 2025, https://doi.org/10.1371/journal.pone.0314525.
- M. T. Nguyen, et al., “Integrated Approach for Vehicle Detection, Tracking, and Counting in Urban Traffic Videos Utilizing YOLOv11 and DeepSORT Algorithms,” In International Conference on Engineering Research and Applications, pp. 200-207, 2025, https://doi.org/10.1007/978-3-032-15836-9_21.
- Z. Tianxiao, L. Bo, S. Ajay and W. Guanghui, “Dynamic Label Assignment for Object detection by Combining Predicted IoUs and Anchor IoUs” Journal of Imaging, vol. 8, no. 7, p. 193, 2022, https://doi.org/10.3390/jimaging8070193.
- D. K. Alqahtani, M. A. Cheema, and A. N. Toosi, “Benchmarking Deep Learning Models for Object Detection on Edge Computing Devices,” Lect. Notes Comput. Sci. (including Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinformatics) , vol. 15404 LNCS, pp. 142–150, 2025, https://doi.org/10.1007/978-981-96-0805-8_11
- X. Lin and Z. Zhu, “Vehicle detection in complex scenarios based on YOLOv5,” Appl. Comput. Eng., vol. 52, no. 1, pp. 157–163, 2024, https://doi.org/10.54254/2755-2721/52/20241500.
- L. Yu and S. Liu, “A Single-Stage Deep Learning-based Approach for Real-Time License Plate Recognition in Smart Parking System,” Int. J. Adv. Comput. Sci. Appl., vol. 14, no. 9, pp. 1142–1150, 2023, https://doi.org/10.14569/IJACSA.2023.01409119.
- L. Kuhyun, H. Jihoon, K. Beom-seok, S. Yuna and L. Dong-hee, “Cost-Stability Evaluation Framework for Reliable Deployment of Object Detectors in Industrial Applications” IEEE Access, 2025, https://doi.org/10.1109/ACCESS.2025.3637545
- D. Tianmin, L. Xujui and L. Wang, “Occlued Vehicle Detection via multi-Scale Hybrid Attention Mechanism in the Road Scene” electronics, 2022, https://doi.org/10.3390/electronics11172709.
- Q. Jiyang et. al., “Occlued Video Instance Segmentation: A Benchmark,” International Journal Of Computer Vision, vol. 130, no. 8, pp. 2022-2039, 2022, https://doi.org/10.1007/s11263-022-01629-1.
- C. Ziang et. al., “Towards Real-World Visual Tracking With Temporal Contexts,” IEEE Transactions on pattern Analysis and Machine Intelligence, vol. 45, no. 12, pp. 15834-15849 2023, https://doi.org/10.1109/TPAMI.2023.3307174.
R. Endro Wibisono (Motorcycle Parking Availability Monitoring Using YOLOv5 and Mobile-Based Systems)