ISSN: 2685-9572 Buletin Ilmiah Sarjana Teknik Elektro
Vol. 8, No. 2, April 2026, pp. 451-462
Predefined-Time Super-Twisting Disturbance-Observer-Based Speed Control for PI-Based FOC Induction Motor Drives
Quang Huy Le, Ngoc Thuy Pham
Faculty of Electrical Engineering Technology, Industrial University of Ho Chi Minh City (IUH), Ho Chi Minh, Viet Nam
ARTICLE INFORMATION |
| ABSTRACT |
Article History: Received 01 January 2026 Revised 02 April 2026 Accepted 17 April 2026 |
| 
This paper proposes a predefined-time super-twisting disturbance-observer-based speed control strategy integrated into a conventional proportional–integral (PI)-based Field-Oriented Control (FOC) framework for induction motor drives. Although PI regulators are widely adopted in industrial FOC systems due to their simplicity, low computational burden, and practical reliability, the mechanical speed loop remains vulnerable to load torque variations and parameter uncertainties, resulting in degraded transient performance and limited disturbance rejection capability. To address this issue, a predefined-time super-twisting disturbance observer is incorporated exclusively into the outer speed loop, while standard PI controllers are preserved for current and flux regulation, thereby maintaining structural simplicity and industrial compatibility. Specifically, a nonlinear predefined-time sliding manifold combined with time-varying adaptive gains is constructed to explicitly shape the convergence behavior and guarantee that the speed tracking error converges within a user-defined time independent of initial conditions and without requiring prior knowledge of disturbance bounds. Rigorous Lyapunov analysis establishes predefined-time stability of the disturbance estimation and overall closed-loop system. Simulation results under speed reversals, step load variations, and stochastic disturbances demonstrate that the proposed method achieves faster convergence, reduced overshoot, and enhanced robustness compared with conventional PI-based FOC, while preserving low implementation complexity and practical feasibility for industrial drive applications. |
Keywords: Six Phase Induction Motor; Proportional–Integral; Field-Oriented Control; Sliding Mode Control; Super-Twisting Algorithm |
Corresponding Author: Ngoc Thuy Pham, Faculty of Electrical Engineering Technology, Industrial University of Ho Chi Minh City (IUH), Ho Chi Minh, Viet Nam. Email: phamthuyngoc@iuh.edu.vn |
This work is open access under a Creative Commons Attribution-Share Alike 4.0 
|
Document Citation: Q. H. Le and N. T. Pham, “Predefined-Time Super-Twisting Disturbance-Observer-Based Speed Control for PI-Based FOC Induction Motor Drives,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 8, no. 2, pp. 451-462, 2026, DOI: 10.12928/biste.v8i2.15761. |
- INTRODUCTION
Induction motors (IMs) remain the most widely used electrical machines in industrial drive systems owing to their rugged structure, low manufacturing cost, high reliability, and minimal maintenance requirements. With the rapid development of energy-efficient industrial processes and electric drive technologies, high-performance control of induction motor drives has become a critical research and application topic [1]–[3]. Among various control strategies, FOC has been established as the industrial standard for IM drives, as it enables decoupled control of torque and flux, achieving dynamic performance comparable to that of separately excited DC motors [4]–[7].
In practical FOC-based IM drive systems, proportional–integral (PI) controllers are predominantly employed in the speed and current control loops due to their simple structure, ease of implementation, and low computational and hardware costs. These advantages make PI controllers particularly attractive for industrial applications where robustness, reliability, and cost-effectiveness are primary concerns [8]–[10]. Consequently, PI-based control architectures continue to dominate commercial IM drive products despite the availability of more advanced nonlinear control techniques.
However, it is well recognized that conventional PI speed controllers exhibit inherent limitations when operating under real-world conditions. Specifically, their performance degrades significantly in the presence of load torque disturbances, parameter variations (e.g., rotor resistance and rotor time constant changes), and unmodeled nonlinear dynamics [11]-[14]. These issues typically manifest as large speed overshoot, prolonged settling time, and weak disturbance rejection capability, particularly during abrupt load changes or low-speed operation. Extensive studies have shown that fixed-gain PI controllers tuned under nominal conditions cannot simultaneously guarantee fast transient response and robust disturbance attenuation over a wide operating range [15]-[16].
To mitigate these drawbacks, numerous PI enhancement strategies have been reported in the literature. Intelligent tuning approaches based on fuzzy logic, neural networks, and reinforcement learning have been investigated to improve adaptability and robustness [17]–[27]. Although such methods can enhance performance under specific conditions, they generally introduce increased structural complexity, require substantial training or heuristic design procedures, and often lack rigorous stability guarantees. Moreover, their reliance on additional computational resources and tuning parameters may limit applicability in cost-sensitive industrial drive systems.
Sliding mode control (SMC) has emerged as an effective alternative for robust electric drive control due to its inherent insensitivity to matched disturbances and parameter uncertainties [28]-[32]. In particular, higher-order sliding mode techniques, such as the super-twisting algorithm (STA), achieve finite-time convergence while significantly reducing chattering compared with classical first-order SMC [33]–[37]. STA-based control strategies have demonstrated strong disturbance rejection and robustness in motor drive applications [38][39]. Nevertheless, most existing SMC- or STA-based approaches replace conventional PI controllers entirely, leading to more complex control architectures and reduced compatibility with existing industrial FOC implementations.
To preserve the simplicity and industrial feasibility of PI-based FOC systems while enhancing robustness, hybrid PI–SMC and PI–STA schemes have been proposed [40]–[42]. Despite these efforts, two important limitations remain. First, many hybrid designs rely on fixed-gain STA structures, whose convergence properties depend on gain selection and may require prior knowledge of disturbance bounds. Second, most existing approaches focus on finite-time convergence, where the settling time depends on initial conditions and cannot be explicitly prescribed, which limits performance predictability in time-critical industrial applications.
Motivated by these challenges, this paper proposes a predefined-time super-twisting disturbance-observer-based speed control strategy for FOC-based induction motor drives. The proposed method retains the conventional PI controllers in the current and flux regulation loops, thereby preserving the original industrial control architecture, while introducing a predefined-time super-twisting disturbance observer exclusively in the mechanical speed loop. Unlike traditional SMC-based controllers that replace the PI structure, the proposed design operates as an auxiliary disturbance compensation mechanism, enhancing robustness without altering the fundamental PI framework.
Furthermore, a nonlinear predefined-time sliding manifold combined with time-varying adaptive gains is constructed to explicitly shape the convergence profile of the speed tracking error. This design guarantees convergence within a user-defined time independent of initial conditions and without requiring prior knowledge of disturbance bounds, thereby overcoming key limitations of conventional finite-time STA-based methods [43]–[48]. As a result, the proposed approach achieves predictable transient performance, improved disturbance rejection capability, and strong robustness, while maintaining low implementation complexity and full compatibility with industrial PI-based FOC systems.
The main contributions of this paper can be summarized as follows:
- A predefined-time super-twisting disturbance-observer-based speed control framework is developed for PI-based FOC induction motor drives (PI-PT STA DOB), enhancing robustness while preserving the conventional PI architecture. In this framework, a nonlinear predefined-time sliding manifold with time-varying adaptive gains is designed to guarantee convergence within a prescribed time, independent of initial conditions and disturbance bounds.
- Comparative simulation studies demonstrate that the proposed method achieves superior transient performance and disturbance rejection capability compared with the conventional PI, while maintaining structural simplicity suitable for industrial applications.
The remainder of this paper is organized as follows. Section II presents the mathematical model of the induction motor. Section III describes the proposed predefined-time disturbance-observer-based speed control structure. Section IV provides the stability analysis of the closed-loop system. Section V presents the simulation results, and Section VI concludes the paper.
- METHODS
- Mathematical model of IMDs
In this section, the dynamic model of the induction motor is formulated in the synchronous rotating reference frame. This representation enables the decoupling of flux and torque components and provides the basis for implementing FOC [49][50]. For improved readability and to facilitate understanding of the mathematical development, the principal symbols and parameters employed in this study are listed in Table 1.
Table 1. Notation List
Symbol | Description | Symbol | Description |
 , , 
| Stator current components in  reference frame (A) reference frame (A) | J | Electromagnetic torque (N.m) |
 , , 
| Stator voltage components in reference frame (V) | B | Combined inertia of motor and load |
 , , 
| Rotor flux linkage components in | 
| Viscous friction coefficient |
 , , 
| Stator flux linkage components in | 
| Stator and rotor self-inductances (H) |

| Rotor angular speed (rad/s) | 
| Mutual inductance (H) |

| Reference rotor angular speed (rad/s) | 𝜎 | Stator and rotor resistances (Ω) |
 , , 
| Load torque, Electromagnetic torque (N.m) | p | Leakage coefficient |

| Positive constant |  , , 
| Stator and rotor flux magnitude (Wb) |
The state-space model representation can be mathematically written as the following equation:
| 
| (1) |
Where:  and
and  can be defined as:
can be defined as:
With:
The stator flux can be estimated such as:
| 
| (2) |
The stator and rotor flux linkage phase is given by:
| 
| (3) |
The electromagnetic torque of the induction motor can be written as:
| 
| (4) |
The mechanical dynamics of the induction motor are governed by:
| 
| (5) |
- Hybrid PI–PTSTADOB Speed Controller Design
Substituting the electromagnetic torque equation (4) into the mechanical dynamics (5) and grouping parameter uncertainties and load torque variations into a lumped disturbance term, the speed subsystem can be rewritten as:
| 
| (6) |
where  denotes the lumped disturbance term including load torque variation, friction uncertainty and parameter perturbations.
denotes the lumped disturbance term including load torque variation, friction uncertainty and parameter perturbations.
Let the speed tracking error be defined as:
| 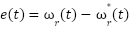
| (7) |
To guarantee convergence within a user-defined time independent of initial conditions, a nonlinear predefined-time sliding surface is constructed as:
| 
| (8) |
Where: 
This structure combines fast far-from-origin convergence ( -term) and strong near-origin contraction ( -term), forming a predefined-time stable manifold. Taking the derivative:
-term), forming a predefined-time stable manifold. Taking the derivative:
| 
| (9) |
Using (6):
| 
| (10) |
The proposed hybrid structure retains the conventional PI controller:
| 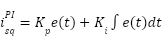
| (11) |
An auxiliary predefined-time super-twisting disturbance observer (PTSTADOB) is introduced:
| 
| (12) |
The total control input becomes:
| 
| (13) |
Unlike classical STA with constant gains, predefined-time convergence is enforced via time-varying gains:
| 
| (14) |
where  is a user-defined convergence time. These gains grow unbounded as
is a user-defined convergence time. These gains grow unbounded as  , enforcing convergence before
, enforcing convergence before  .
.
Consider the Lyapunov function:
| 
| (15) |
Taking derivative:
| 
| (16) |
Substituting (12):
| 
| (17) |
Choosing  and assuming bounded disturbance
and assuming bounded disturbance  we obtain:
we obtain:
| 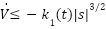
| (18) |
Substituting (14):
| 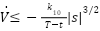
| (19) |
Since  there exists
there exists  such that:
such that:
| 
| (20) |
Integrating both sides yields:
Therefore:  which implies
which implies  . The settling time is explicitly determined by the design parameter:
. The settling time is explicitly determined by the design parameter:  . The closed-loop PI–PTSTADOB speed control system guarantees global predefined-time stability, and the speed tracking error converges to zero exactly within the user-specified time .
. The closed-loop PI–PTSTADOB speed control system guarantees global predefined-time stability, and the speed tracking error converges to zero exactly within the user-specified time .
- RESULT AND DISCUSSION
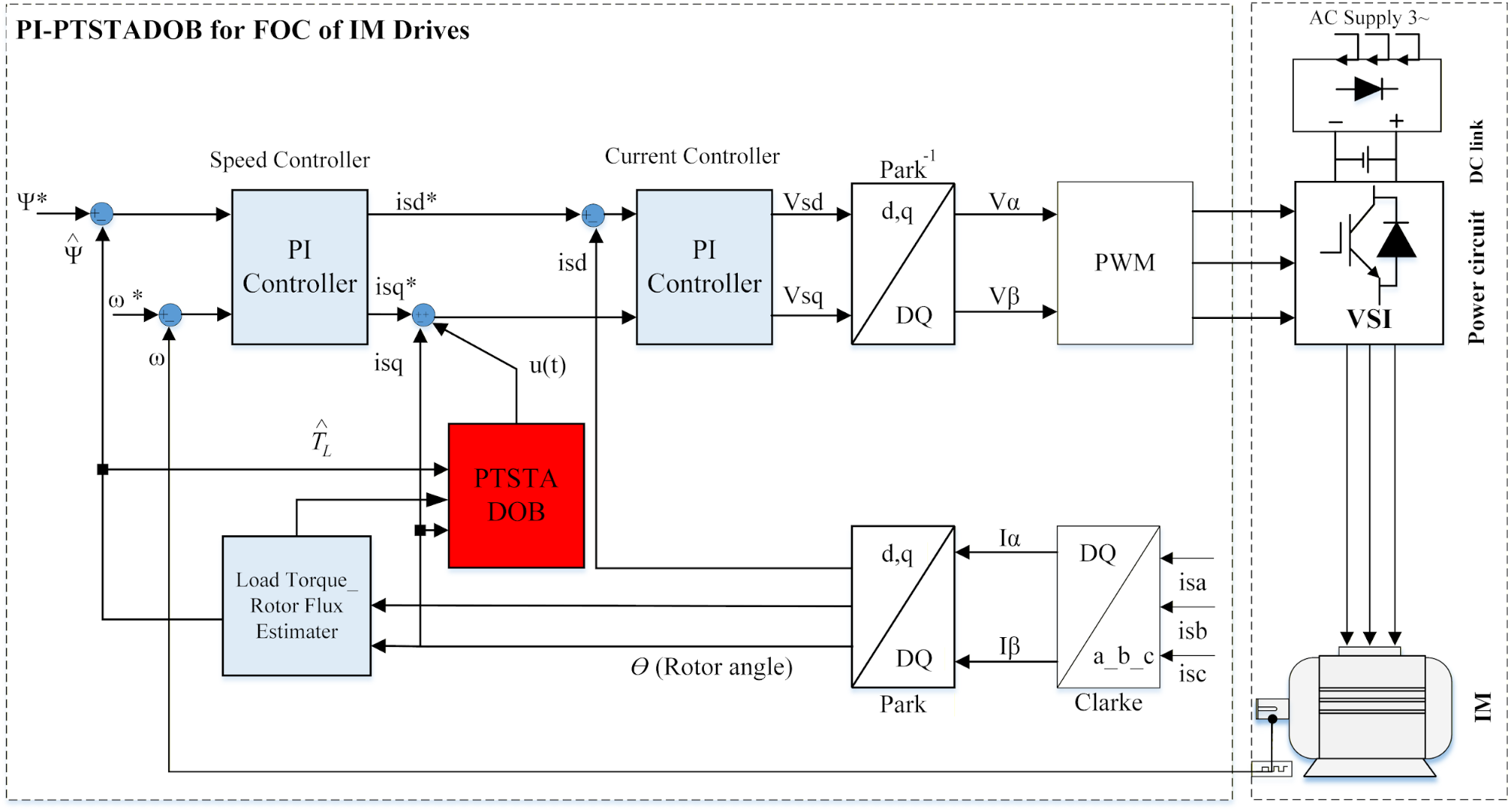
The proposed hybrid PI–PTSTADOB control strategy was validated through MATLAB/Simulink 2023b simulations using a squirrel-cage induction motor with the following ratings:  . The simulation model is presented in Figure 1.
. The simulation model is presented in Figure 1.
- Dynamic Performance Evaluation under Rated Load Torque
Figure 2 and Table 2 provide a comprehensive comparative evaluation of the dynamic performance of the conventional PI, PI–STA, and the proposed PI–PTSTADOB controllers under rated load conditions. As observed from the speed responses in Figure 2, all three strategies are capable of tracking the reference command; however, their transient characteristics, robustness to load disturbances, and steady-state accuracy differ significantly.
During acceleration and deceleration intervals, the conventional PI controller exhibits pronounced overshoot and oscillatory behavior. Although the settling time is relatively short (0.0223s), the transient response is poorly damped, indicating limited robustness against load torque disturbances and parameter uncertainties. This is further reflected by the relatively high overshoot and large error indices in Table 2.
The PI–STA controller improves disturbance rejection and reduces oscillatory behavior compared with the PI scheme. The overshoot is significantly reduced to 0.1209, and the integral error indices (ISE and IAE) decrease accordingly. However, residual oscillations remain observable in the zoomed-in responses, which can be attributed to the fixed-gain super-twisting mechanism and its sensitivity to gain selection. Although the settling time (0.0227 s) is comparable to that of the PI controller, the overall transient quality remains limited by the trade-off between robustness and chattering attenuation.
In contrast, the proposed PI–PTSTADOB controller achieves a substantially improved dynamic response. The predefined-time sliding manifold combined with time-varying super-twisting gains ensures rapid convergence with enhanced damping characteristics. As shown in Table 2, the overshoot is reduced to only 0.0131, corresponding to approximately 98.4% and 89.2% reductions compared with PI and PI–STA, respectively. Unlike conventional STA approaches, the predefined-time gain scheduling enforces strong convergence near the sliding surface while avoiding excessive oscillatory behavior.
Moreover, the error performance indices demonstrate the superiority of the proposed method. The ISE decreases from 0.0213 (PI) and 0.0083 (PI–STA) to 0.00082, representing reductions of approximately 96% and 90%, respectively. Similarly, the IAE is reduced to 0.0124, confirming improved disturbance rejection and faster attenuation of tracking errors. Most notably, the speed RMSE drops dramatically to 0.0641, which corresponds to an 80.4% reduction relative to PI and a 68.6% reduction relative to PI–STA. This significant reduction in steady-state fluctuation highlights the effectiveness of the predefined-time disturbance observer in compensating load variations and modelling uncertainties.
Although the settling times of PI–STA and PI–PTSTADOB are numerically similar, the qualitative transient behavior differs markedly. The proposed controller achieves near-zero overshoot, minimal oscillations, and smoother torque and current responses, as illustrated in Figure 2. This indicates that the improvement is not merely in convergence speed but in overall closed-loop damping, robustness, and control smoothness.
These results confirm that integrating a predefined-time super-twisting disturbance observer into the conventional PI–FOC framework preserves the simplicity and industrial feasibility of PI control while significantly enhancing transient stability, disturbance rejection capability, and steady-state precision. The predefined-time design further guarantees convergence within a user-specified time horizon independent of initial conditions, which distinguishes the proposed approach from conventional finite-time or fixed-gain STA-based methods.
Figure 1. Simulation Model of Hybrid PI-PTSTADOB Based FOC
Figure 2. Dynamic Performance of PI, PI-STA and PI-PTSTADOB under Rated Load Moment
Table 2. Quantitative Dynamic Performance Comparison under Rated Load Torque
Control strategy | SettlingTime | Overshoot | ISE | IAE | RMSE_speed |
PI Control | 0.0223 | 0.8434 | 0.0213 | 0.0640 | 0.3264 |
PI-STA | 0.0227 | 0.1209 | 0.0083 | 0.0337 | 0.2043 |
PI-PTSTADOB | 0.0221 | 0.0131 | 0.00082 | 0.0124 | 0.0641 |
- Robustness Evaluation under Load Disturbance
Figure 3 presents a comprehensive robustness assessment of the conventional PI, PI–STA, and the proposed PI–PTSTADOB controllers under stepwise load torque variations conditions. The comparison focuses on speed regulation accuracy, torque response smoothness, and current behavior, thereby providing a systematic evaluation of disturbance rejection capability.
In the left column of Figure 3, the reference speed is subjected to multiple step changes while the load torque varies abruptly. Under these disturbance intervals, the conventional PI controller exhibits noticeable speed deviations and prolonged recovery periods, reflecting limited robustness against sudden load perturbations. Although the PI–STA controller improves disturbance attenuation due to the sliding-mode action, residual oscillations and ripple remain observable, particularly during successive load transitions. These oscillations are mainly caused by the fixed-gain super-twisting mechanism, which cannot adapt its convergence intensity to varying disturbance levels.
By contrast, the proposed PI–PTSTADOB controller maintains close tracking of the reference speed with negligible deviation throughout all disturbance intervals. The enlarged views demonstrate rapid recovery immediately after each load step, with significantly suppressed oscillations. This enhanced behavior results from the predefined-time sliding manifold combined with time-varying super-twisting gains, which enforce strong convergence within a user-defined time horizon independent of initial conditions and disturbance magnitude. Unlike conventional finite-time or fixed-gain STA schemes, the predefined-time design ensures uniform convergence speed and consistent disturbance compensation performance under varying load conditions.
The torque responses further validate these observations. The PI controller generates large torque spikes during load transitions, which induce mechanical stress and amplify speed oscillations. The PI–STA controller reduces peak torque magnitude but still exhibits oscillatory behavior. In contrast, the PI–PTSTADOB strategy produces smoother torque transitions with reduced ripple, indicating effective lumped disturbance estimation and compensation. The coordinated torque–speed response demonstrates improved damping characteristics and enhanced closed-loop stability.
The stator current responses further corroborate the superiority of the proposed approach. The PI controller exhibits pronounced current spikes and increased ripple in the current components, indicating higher electrical stress and reduced noise immunity. The PI–STA controller partially mitigates these effects but still introduces oscillatory current components. In contrast, the PI–PTSTADOB controller maintains smooth and bounded current trajectories with reduced peak amplitudes, demonstrating improved current stress management and enhanced robustness against disturbance-induced fluctuations.
Overall, the results confirm that integrating the predefined-time super-twisting disturbance observer into the conventional PI–FOC framework significantly enhances robustness without increasing structural complexity. The proposed method achieves superior disturbance rejection, smoother torque and current responses, and consistent predefined-time convergence, thereby preserving industrial feasibility while substantially improving closed-loop performance under both deterministic and stochastic disturbance conditions.
Figure 3. Robustness Evaluation under Load Disturbance
- CONCLUSIONS
This paper has proposed a hybrid predefined-time super-twisting disturbance-observer-based speed control strategy for PI-based FOC induction motor drives. Unlike conventional sliding-mode-based approaches that replace the PI structure, the proposed method preserves the simplicity and industrial compatibility of the classical PI–FOC framework while enhancing robustness through an auxiliary predefined-time super-twisting disturbance observer integrated into the speed loop. By constructing a nonlinear predefined-time sliding manifold and employing time-varying super-twisting gains, the proposed controller guarantees convergence of the speed tracking error within a user-defined time independent of initial conditions and without requiring prior knowledge of disturbance bounds. Lyapunov-based analysis has rigorously established global predefined-time stability of the closed-loop system. Comprehensive simulation studies under rated load and stepwise load variations demonstrate that the proposed PI–PTSTADOB strategy achieves significantly reduced overshoot, substantially lower error indices (ISE, IAE, and RMSE), smoother torque transitions, and improved current behavior compared with conventional PI and PI–STA controllers. In particular, the results confirm that the improvement is not limited to faster convergence but extends to enhanced damping characteristics, stronger disturbance rejection capability, and reduced oscillatory behavior. Importantly, these performance gains are obtained without increasing structural complexity or computational burden, thereby maintaining practical feasibility for industrial implementation. Overall, the proposed approach provides an effective and theoretically guaranteed solution for high-performance and robust speed regulation of induction motor drives operating under uncertain and disturbance-prone conditions.
Future research will focus on extending the proposed PI–PTSTADOB strategy toward experimental validation on real-time hardware platforms to further confirm its practical applicability under industrial operating conditions. Furthermore, he development of a sensorless control scheme incorporating the predefined-time disturbance observer is also a promising direction to reduce system cost and improve reliability.
REFERENCES
- M. L. De Klerk and A. K. Saha, "A Comprehensive Review of Advanced Traction Motor Control Techniques Suitable for Electric Vehicle Applications," in IEEE Access, vol. 9, pp. 125080-125108, 2021, https://doi.org/10.1109/ACCESS.2021.3110736.
- H. J. Abu-Rub, A. Iqbal, and J. Guzinski. High Performance Control of AC Drives with Matlab/Simulink. Hoboken, NJ, USA: John Wiley & Sons. 2021, https://doi.org/10.1002/9781119591313.
- A. El-Shahat. Induction Motors: Recent Advances, New Perspectives and Applications. 2023, https://doi.org/10.5772/intechopen.104031.
- M. A. Azab, "A Review of Recent Trends in High-Efficiency Induction Motor Drives," in Vehicles, vol. 7, no. 1, p. 15, 2025, https://doi.org/10.3390/vehicles7010015.
- E. B. Agamloh and A. Cavagnino, "High efficiency design of induction machines for industrial applications," in Proc. IEEE Workshop Electr. Mach. Design, Control Diagnosis (WEMDCD), pp. 33-46, 2013, https://doi.org/10.1109/WEMDCD.2013.6525163.
- P. C. Krause, O. Wasynczuk, S. D. Sudhoff, and S. Pekarek, Analysis of Electric Machinery and Drive Systems, 3rd ed. Hoboken, NJ, USA: Wiley-IEEE Press, 2013, https://doi.org/10.1002/9781118524336.
- R. W. De Doncker, D. W. Pulle, and A. Veltman. Advanced electrical drives: analysis, modeling, control. Springer Nature. 2020. https://doi.org/10.1007/978-3-030-48977-9.
- J. K. Jain, S. Ghosh, and S. Maity, "Concurrent PI Controller Design for Indirect Vector Controlled Induction Motor," in Asian Journal of Control, vol. 22, no. 1, pp. 130-142, 2018, https://doi.org/10.1002/asjc.1911.
- N. Goel, S. Chacko, and R. Patel, "PI Controller Tuning Based on Stochastic Optimization Technique for Performance Enhancement of DTC Induction Motor Drives," in Journal of the Institution of Engineers (India): Series B, vol. 101, pp. 1-8, 2020, https://doi.org/10.1007/s40031-020-00496-z.
- K.-K. Shyu, F.-J. Lin, H.-J. Lin, and B.-S. Juang, "Robust variable structure speed control for induction motor drive," in IEEE Transactions on Aerospace and Electronic Systems, vol. 35, no. 1, pp. 215-224, 1999, https://doi.org/10.1109/7.745693.
- J. Wang, F. Wang, Z. Zhang, S. Li, and J. Rodríguez, "Disturbance Compensation-Based Enhanced Robust Finite Control Set Predictive Torque Control for Induction Motor Systems," in IEEE Transactions on Industrial Informatics, vol. 13, no. 5, pp. 2645-2656, 2017, https://doi.org/10.1109/TII.2017.2679283.
- S. V. Ustun and M. Demirtas, "Optimal Tuning of PI Coefficients by Using Fuzzy-Genetic Algorithm for V/f Controlled Induction Motor," in Expert Systems with Applications, vol. 34, no. 4, pp. 2714-2720, 2008, https://doi.org/10.1016/j.eswa.2007.05.029.
- Q. A. Tarbosh et al., "Review and Investigation of Simplified Rules Fuzzy Logic Speed Controller of High-Performance Induction Motor Drives," in IEEE Access, vol. 8, pp. 49377-49394, 2020, https://doi.org/10.1109/ACCESS.2020.2977115.
- W. Shipman and L. Coetzee, "Reinforcement Learning and Deep Neural Networks for PI Controller Tuning," in IFAC-PapersOnLine, vol. 52, no. 29, pp. 111-116, 2019, https://doi.org/10.1016/j.ifacol.2019.09.173.
- W. Song, J. Li, C. Ma, Y. Xia, and B. Yu, "A Simple Tuning Method of PI Regulators in FOC for PMSM Drives Based on Deadbeat Predictive Conception," in IEEE Transactions on Transportation Electrification, vol. 10, no. 4, pp. 9852-9863, 2024, https://doi.org/10.1109/TTE.2024.3385114.
- R. Marouane and Z. Malika, "Particle Swarm Optimization for Tuning PI Controller in FOC Chain of Induction Motors," in Proc. 4th Int. Conf. Optimization and Applications (ICOA), pp. 1-5, 2018, https://doi.org/10.1109/ICOA.2018.8370512.
- R. Arulmozhiyal and K. Baskaran, "Implementation of a Fuzzy PI Controller for Speed Control of Induction Motors Using FPGA," in Journal of Power Electronics, vol. 10, no. 1, pp. 65-71, 2010, https://doi.org/10.6113/JPE.2010.10.1.065.
- H. Li, B. Song, T. Chen, Y. Xie, and X. Zhou, "Adaptive fuzzy PI controller for permanent magnet synchronous motor drive based on predictive functional control," in Journal of the Franklin Institute, vol. 358, no. 15, pp. 7333-7364, 2021, https://doi.org/10.1016/j.jfranklin.2021.07.024.
- W. Cui, Y. Jiang, B. Zhang, and Y. Shi, "Structured Neural-PI Control with End-to-End Stability and Output Tracking Guarantees," Advances in Neural Information Processing Systems, vol. 36, pp. 68434-68457, 2023, https://doi.org/10.52202/075280-2992.
- U. Alejandro-Sanjines, A. Maisincho-Jivaja, V. Asanza, L. Lorente, and D. Peluffo-Ordóñez, "Adaptive PI Controller Based on a Reinforcement Learning Algorithm for Speed Control of a DC Motor," in Biomimetics, vol. 8, no. 5, p. 434, 2023, https://doi.org/10.3390/biomimetics8050434.
- I. Djelamda and I. Bouchareb, "Field-oriented control based on adaptive neuro-fuzzy inference system for PMSM dedicated to electric vehicle," in Bulletin of Electrical Engineering and Informatics, vol. 11, no. 4, pp. 1892-1901, 2022, https://doi.org/10.11591/eei.v11i4.3818.
- F. Saidi, F. Naceri, L. Youb, M. Cernat, and L. Guasch Pesquer, "Two Types of Fuzzy Logic Controllers for the Speed Control of the Doubly-Fed Induction Machine," in Advances in Electrical and Computer Engineering, vol. 20, no. 3, pp. 65-74, 2020, https://doi.org/10.4316/AECE.2020.03008.
- P. Kumar, S. Nema, and P. K. Padhy, "PID controller for nonlinear system using cuckoo optimization," in Proc. Int. Conf. Control, Instrumentation, Communication and Computational Technologies (ICCICCT), pp. 711-716, 2014, https://doi.org/10.1109/ICCICCT.2014.6993052.
- H. Goud and P. Swarnkar, “Investigations on Metaheuristic Algorithm for Designing Adaptive PID Controller for Continuous Stirred Tank Reactor: H. Goud, P. Swarnkar,” Mapan, vol. 34, no. 1, pp. 113-119, 2019, https://doi.org/10.1007/s12647-018-00300-w.
- Z. Chu, Q. Guo, and C. Wang, "The PID Control Algorithm based on Whale Optimization Algorithm Optimized BP Neural Network," in Proc. IEEE 7th Information Technology and Mechatronics Engineering Conference (ITOEC), pp. 2450-2453, 2023, https://doi.org/10.1109/ITOEC57671.2023.10291531.
- I. Kasim and W. Riyadh, "On the Improved Nonlinear Tracking Differentiator based Nonlinear PID Controller Design," in International Journal of Advanced Computer Science and Applications, vol. 7, no. 10, 2016, https://doi.org/10.14569/IJACSA.2016.071032.
- S. Nadweh, O. Khaddam, G. Hayek, B. Atieh, and H. H. Alhelou, "Optimization of P & PI controller parameters for variable speed drive systems using a flower pollination algorithm," in Heliyon, vol. 6, no. 8, 2020, https://doi.org/10.1016/j.heliyon.2020.e04648.
- N. Derbel, J. Ghommam, and Q. Zhu, Applications of Sliding Mode Control. Singapore: Springer, 2017, https://doi.org/10.1007/978-981-10-2374-3.
- L. Fridman and A. Poznyak, "Robust Output LQ Optimal Control via Integral Sliding Modes," in IEEE Transactions on Automatic Control, vol. 56, no. 11, pp. 2699-2704, 2011, https://doi.org/10.1109/TAC.2011.2159420.
- L. Wu, J. Liu, S. Vazquez, and S. K. Mazumder, "Sliding Mode Control in Power Converters and Drives: A Review," in IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 3, pp. 392-406, 2022, https://doi.org/10.1109/JAS.2021.1004380.
- C. A. Martínez-Fuentes, U. Pérez-Ventura, and L. Fridman, "Chattering analysis for Lipschitz continuous sliding-mode controllers," in International Journal of Robust and Nonlinear Control, vol. 31, no. 9, pp. 3779-3794, 2021, https://doi.org/10.1002/rnc.5239.
- L. Qu, W. Qiao, and L. Qu, "Active-Disturbance-Rejection-Based Sliding-Mode Current Control for Permanent-Magnet Synchronous Motors," in IEEE Transactions on Power Electronics, vol. 36, no. 1, pp. 751-760, 2021, https://doi.org/10.1109/TPEL.2020.3003666.
- X. Xiong, H. Chen, Y. Lou, Z. Liu, S. Kamal, and M. Yamamoto, "Implicit Discrete-Time Adaptive First-Order Sliding Mode Control With Predefined Convergence Time," in IEEE Transactions on Circuits and Systems II: Express Briefs, vol. 68, no. 12, pp. 3562-3566, 2021, https://doi.org/10.1109/TCSII.2021.3070435.
- S. Chen, W. Huang, and Q. Liu, "A New Adaptive Robust Sliding Mode Control Approach for Nonlinear Singular Fractional-Order Systems," in Fractal and Fractional, vol. 6, no. 5, 2022, https://doi.org/10.3390/fractalfract6050253.
- F. Shiravani, P. Alkorta, J. A. Cortajarena, and O. Barambones, "An Enhanced Sliding Mode Speed Control for Induction Motor Drives," in Actuators, vol. 11, no. 1, 2022, https://doi.org/10.3390/act11010018.
- A. Chalanga et al., "Implementation of Super-Twisting Control: Super-Twisting and Higher-Order Sliding-Mode Observer-Based Approaches," in IEEE Transactions on Industrial Electronics, vol. 63, no. 6, pp. 3677-3685, 2016, https://doi.org/10.1109/TIE.2016.2523913.
- R. Seeber and M. Reichhartinger, "Conditioned Super-Twisting Algorithm for Systems with Saturated Control Action," in Automatica, vol. 116, p. 108921, 2020, https://doi.org/10.1016/j.automatica.2020.108921.
- S. Ding, Q. Hou, and H. Wang, "Disturbance-Observer-Based Second-Order Sliding Mode Controller for Speed Control of PMSM Drives," in IEEE Transactions on Energy Conversion, vol. 38, no. 1, pp. 100-110, 2023, https://doi.org/10.1109/TEC.2022.3188630.
- B. Wang, T. Wang, Y. Yu, and D. Xu, "Second-Order Terminal Sliding-Mode Speed Controller for Induction Motor Drives With Nonlinear Control Gain," in IEEE Transactions on Industrial Electronics, vol. 70, no. 11, pp. 10923-10934, 2023, https://doi.org/10.1109/TIE.2022.3231248.
- N. T. Pham, "Design of Novel STASOSM Controller for FOC Control of Dual Star Induction Motor Drives," in International Journal of Robotics and Control Systems, vol. 4, no. 3, pp. 1059-1074, 2024, https://doi.org/10.31763/ijrcs.v4i3.1443.
- A. Nurettin and N. İnanç, "High-Performance Induction Motor Speed Control Using a Robust Hybrid Controller With a Supertwisting Sliding Mode Load Disturbance Observer," in IEEE Transactions on Industrial Electronics, vol. 70, no. 8, pp. 7743-7752, 2023, https://doi.org/10.1109/TIE.2022.3222625.
- N. T. Pham and T. D. Le, "A Novel FOC Vector Control Structure Using RBF Tuning PI and Sliding Mode for SPIM Drives," in International Journal of Intelligent Engineering Systems, vol. 13, no. 5, pp. 429-440, 2020, https://doi.org/10.22266/ijies2020.1031.38.
- Z. Kang, X. Lin, Z. Liu, X. Shen, Y. Gao, and J. Liu, "Adaptive Generalized Super-Twisting Sliding Mode Control for PMSM Drives," in IEEE Transactions on Energy Conversion, vol. 41, no. 1, pp. 148-159, 2026, https://doi.org/10.1109/TEC.2025.3590203.
- N. T. Pham, "An Improved BS_NAHOSM Hybrid Control Strategy for FOC of Dual Star Induction Motor Drives," in Periodica Polytechnica Electrical Engineering and Computer Science, vol. 69, no. 3, pp. 226-235, 2025, https://doi.org/10.3311/PPee.37384.
- A. Ammar, O. Belaroussi, A. Zemmit, H. Said, and N. Belmadani, "Super-Twisting MRAS Observer-Based Non-linear Direct Flux and Torque Control for Induction Motor Drives," in Power Electronics and Drives, vol. 9, no. 2, pp. 55-66, 2024, https://doi.org/10.2478/pead-2024-0024.
- M. Hu, H. Ahn, and K. You, "Speed Tracking of SPMSM via Super-Twisting Logarithmic Fast Terminal Sliding-Mode Control," in IEEE Access, vol. 11, pp. 91904-91912, 2023, https://doi.org/10.1109/ACCESS.2023.3308156.
- W. Wang, Y. Ye, X. Chen, and Y. Yuan, "Adaptive High-Order Sliding-Mode Low-Speed Control With RBF Neural Network Nonlinear Disturbance Observer for PMSM Drive System," in IEEE Transactions on Power Electronics, vol. 40, no. 8, pp. 10865-10876, 2025, https://doi.org/10.1109/TPEL.2025.3559890.
- H. Ríos, R. Franco, A. F. de Loza, and D. Efimov, "A High-Order Sliding-Mode Adaptive Observer for Uncertain Nonlinear Systems," in IEEE Transactions on Automatic Control, vol. 68, no. 1, pp. 408-415, 2023, https://doi.org/10.1109/TAC.2021.3139308.
- I. M. Mehedi, N. Saad, M. A. Magzoub, U. M. Al-Saggaf, and A. H. Milyani, "Simulation Analysis and Experimental Evaluation of Improved Field-Oriented Controlled Induction Motors Incorporating Intelligent Controllers," in IEEE Access, vol. 10, pp. 18380-18394, 2022, https://doi.org/10.1109/ACCESS.2022.3150360.
- L. Yi et al., "Intelligent detection of stator and rotor faults of induction motor based on improved backstepping sliding mode observer," in International Journal of Dynamics and Control, vol. 11, pp. 666-679, 2023, https://doi.org/10.1007/s40435-022-01010-7.
AUTHOR BIOGRAPHY

| Quang Huy Le was born in 2001, in Vietnam. He received his engineer's degree in Electrical and Electronic Engineering from Ho Chi Minh City University of Industry in 2023. In 2024, he began pursuing the Master's program at Ho Chi Minh City University of Industry. His research interests include motor drives, multiphase motors, renewable energy, embedded systems, and intelligent control. He can be contacted at email: huylq2471@pgr.iuh.edu.vn. |
|
|

| Ngoc Thuy Pham     is a lecturer in Department of Electrical Engineering Technology, Industrial University of Ho Chi Minh City (IUH), Ho Chi Minh, Viet Nam. She received the B.Sc. and M.Sc. degrees in Electrical Engineering from Thai Nguyen University of Technology in 1994 and Ho Chi Minh City University of Technology (HCMUT) in 2009, respectively. and Ph.D. degree in control engineering and automation from TE and Electrical Engineering from Ho Chi Minh City University of Transport, in 2020. Her current research interests include power electronics, AC motor drives, intelligent control, multiphase induction motor, sensorless control of multiphase induction motor drives, embedded system. She can be contacted at email: phamthuyngoc@iuh.edu.vn. is a lecturer in Department of Electrical Engineering Technology, Industrial University of Ho Chi Minh City (IUH), Ho Chi Minh, Viet Nam. She received the B.Sc. and M.Sc. degrees in Electrical Engineering from Thai Nguyen University of Technology in 1994 and Ho Chi Minh City University of Technology (HCMUT) in 2009, respectively. and Ph.D. degree in control engineering and automation from TE and Electrical Engineering from Ho Chi Minh City University of Transport, in 2020. Her current research interests include power electronics, AC motor drives, intelligent control, multiphase induction motor, sensorless control of multiphase induction motor drives, embedded system. She can be contacted at email: phamthuyngoc@iuh.edu.vn. |
Quang Huy Le (Predefined-Time Super-Twisting Disturbance-Observer-Based Speed Control for PI-Based FOC Induction Motor Drives)