ISSN: 2685-9572 Buletin Ilmiah Sarjana Teknik Elektro
Vol. 8, No. 2, April 2026, pp. 504-514
Intelligent Modelling of Electromechanical Piezoelectric Actuator
Mohammed Jawad Mohammed, Akeel Abtan, Raheel Jawad
Electromechanical Engineering Collage, University of Technology Iraq, Baghdad, Iraq
ARTICLE INFORMATION |
| ABSTRACT |
Article History: Received 20 October 2025 Revised 25 January 2026 Accepted 28 April 2026 |
| 
This research models a piezoelectric actuator using ARX model with particle swarm optimization method. System modeling is a crucial step in engineering for understanding system behavior and implementing control strategies especially when employing intelligent and precise modeling techniques. This research contributes by introducing a new type of modeling in this field by employing the Autoregressive with eXogenous inputs (ARX) model and the estimation parameters calculated by PSO method. In current work, 0 to 35 V as sinusoidal frequency wave at 1.2 Hz supplied to piezoelectric actuator (PZT) to collect the vibration as an output for the system using an accelerometer sensor. Then, double integration was employed to collect the displacement data. One side of the PZT was fixed, while the other was left free. MATLAB program 2022b employed to build the ARX model and manage the particle swarm optimization (PSO) variables such as swarm size and iterations to obtain the transfer function that represents dynamic behavior through input and output readings. The results appeared effectively of PSO and representing the accurate transfer function in continuous and discrete times. The PZT validated by recorded the minimum mean square error (MSE) up to 3.447×10-6 and the system behavior was within the confident limit at 95 % before and after the modeling process. The developed model can be used to design a robust vibration controller in the future or for energy harvesting. |
Keywords: Particle Swarm Optimization; Parametric System Identification Technique; Real-Time Displacement Model; Electromechanical Material Affect; Piezoelectric Actuator |
Corresponding Author: Mohammed Jawad Mohammed, Electromechanical Engineering Collage, University of Technology, Baghdad, Iraq. mohammed.j.mohammed@uotechnology.edu.iq: |
This work is open access under a Creative Commons Attribution-Share Alike 4.0 
|
Document Citation: M. J. Mohammed, A. Abtan, and R. Jawad, “Intelligent Modelling of Electromechanical Piezoelectric Actuator,” Buletin Ilmiah Sarjana Teknik Elektro, vol. 8, no. 2, pp. 504-514, 2026, DOI: 10.12928/biste.v8i2.15020. |
- INTRODUCTION
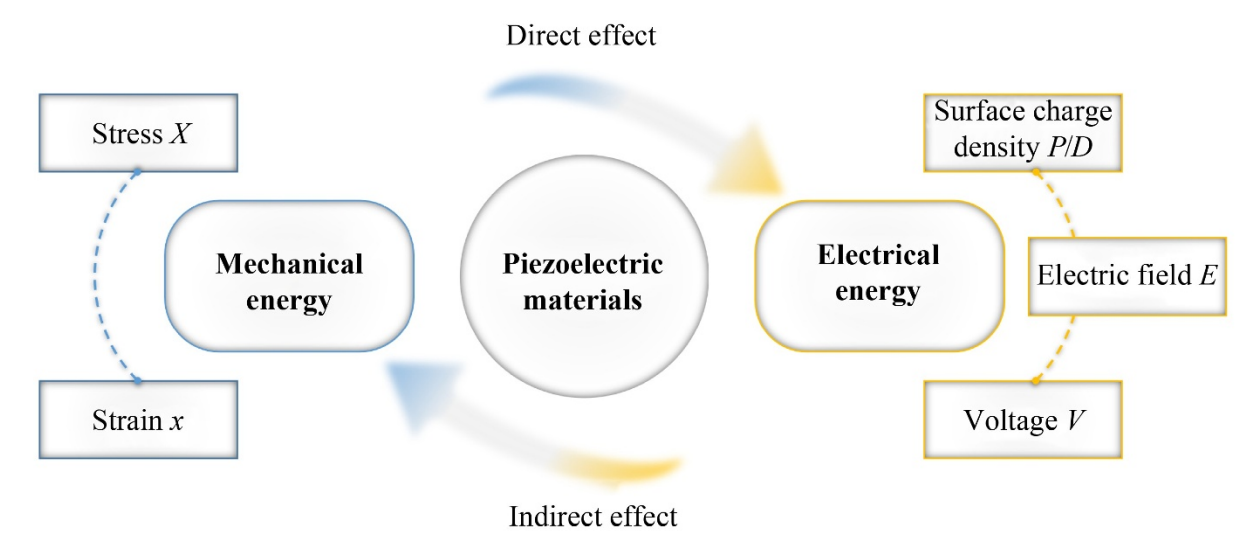
Piezoelectric are special materials that have electromagnetic properties through converting between kinetic and electrical energies and vice versa and is widely used as a sensor or actuator. However, modeling these materials is challenging due to their dynamic and nonlinear behaviors. In order to better regulate, identify, and compensate for piezoelectric systems, the ARX (Auto Regressive with Exogenous input) model has been widely used [1][2]. This material has attracted the attention of researchers in many applications, including bioengineering, robotics, nano and micro instruments etc. [3]-[5]. Algorithms such as recursive least squares, hybrid whale optimization, and the bat method have been used to increase the accuracy and speed of parameter estimation in ARX models [6]. Piezoelectric effect was observed by Jacques Weber-Curie by applying mechanical stress and generating an electric charge in 1880 [7]. One of the biggest challenges in generating a model for piezoelectric actuators is determined by several factors, including those related to their physical properties, which are affected by mechanical and electrical factors such as temperature and frequency [8], and those related to non-linear behavior and deformations when exposed to high stresses that affect the mechanical or electrical response [9]. Finally, these actuators may interact with the surrounding environment, whether mechanical, electrical, or electronic systems, such as resonance, unwanted vibrations, and hysteresis [10]. All the above factors may lead to additional complexity in modeling, which requires the creation of an accurate model based on smart methods (optimization techniques) to ensure integrated and stable performance [11]. Many researchers have dealt with piezoelectric as a sensor or actuator based on their applications whether using piezoelectricity to obtain electrical energy or to obtain mechanical displacement as seen in Figure 1. It is worth noting that the ability of materials to generate an electric charge as a result of mechanical pressure and vice versa, or what is called the piezoelectric effect, is one of the important phenomena to study [12].
Figure 1. Energy conversion of piezoelectric effect [12]
In most cases, the piezoelectric effect is caused by the electromechanical connection that occurs between the characteristics of the dielectric and the elastic. Dielectric characteristics primarily relate to the electric displacement and field, while the relationship between stress and strain refers to elastic characteristics. Both properties are important in understanding the behavior of a material [12][13]. The main classification of piezoelectric actuator (PZA) is direct and indirect actuator. The term 'direct piezoelectric actuators' refers to piezoelectric actuators that make advantage of the stretching action of the piezoelectric film in a straightforward manner, without the need for a sophisticated structural and primary design. As a result, it integrates characteristics such as high accuracy, simple design, and quick reaction [14][15], and it is particularly well-suited for applications that need very high precision and involve short strokes. In contrast to direct piezoelectric actuators, indirect piezoelectric actuators employ complicated structures to convert the deformation of piezoelectric materials into indirect displacement. Compared to simple amplification, the connection between output displacement and the material deformation is more complicated. Indirect piezoelectric actuators may provide a bigger attenuation and responses with multi degrees of freedom (DOFs) using techniques such stepping and repeating [15]-[17]. However, they may require different model structures due to their complexity. This large class is further subdivided into two subcategories, stepping actuators [18] and ultrasonic actuators [19], based on the operating principle.
On the other hand, particle optimization method (PSO) solves various engineering problems with same or higher solution quality and fewer computing cost than other optimization techniques because to providing quick convergence or fewer evaluations [20], easy arithmetic updates [21], and good exploration–exploitation balance [22]. Piezoelectric modeling has become an important issue in recent years, as it is required in simulating systems, whether sensors or actuators, and on the other hand, to control systems. If the modeling process is inaccurate, it will lead to inaccurate results and unstable signals [23]. Li and et al, used backpropagation neural network, and a genetic algorithm to model the linear piezoelectric actuator [23]. Joel Shields and Edward Konefat modelled PZA using finite element model [24]. PZA hysteresis also models in many papers [25] or based on different loads [26]. This work presents a new modeling of the PZA by ARX-PSO to represent the displacement compared to supplied voltages as a main contribution, which makes the control process less complex in future. This paper consists of many sections, which include the introduction of PZA with previous works, the ARX model with the estimation method (PSO) and the conducting of an experimental procedure to gather input and output data using integrated measuring equipment, followed by the presentation of findings and conclusions.
- METHODOLOGY
This work aims to employ a new model for PZA based on parametric system identification technique. Figure 2 presents the flowchart that followed in this work after implementing the experimental rig and collecting the input and output data to represent the dynamic behavior of PZA.
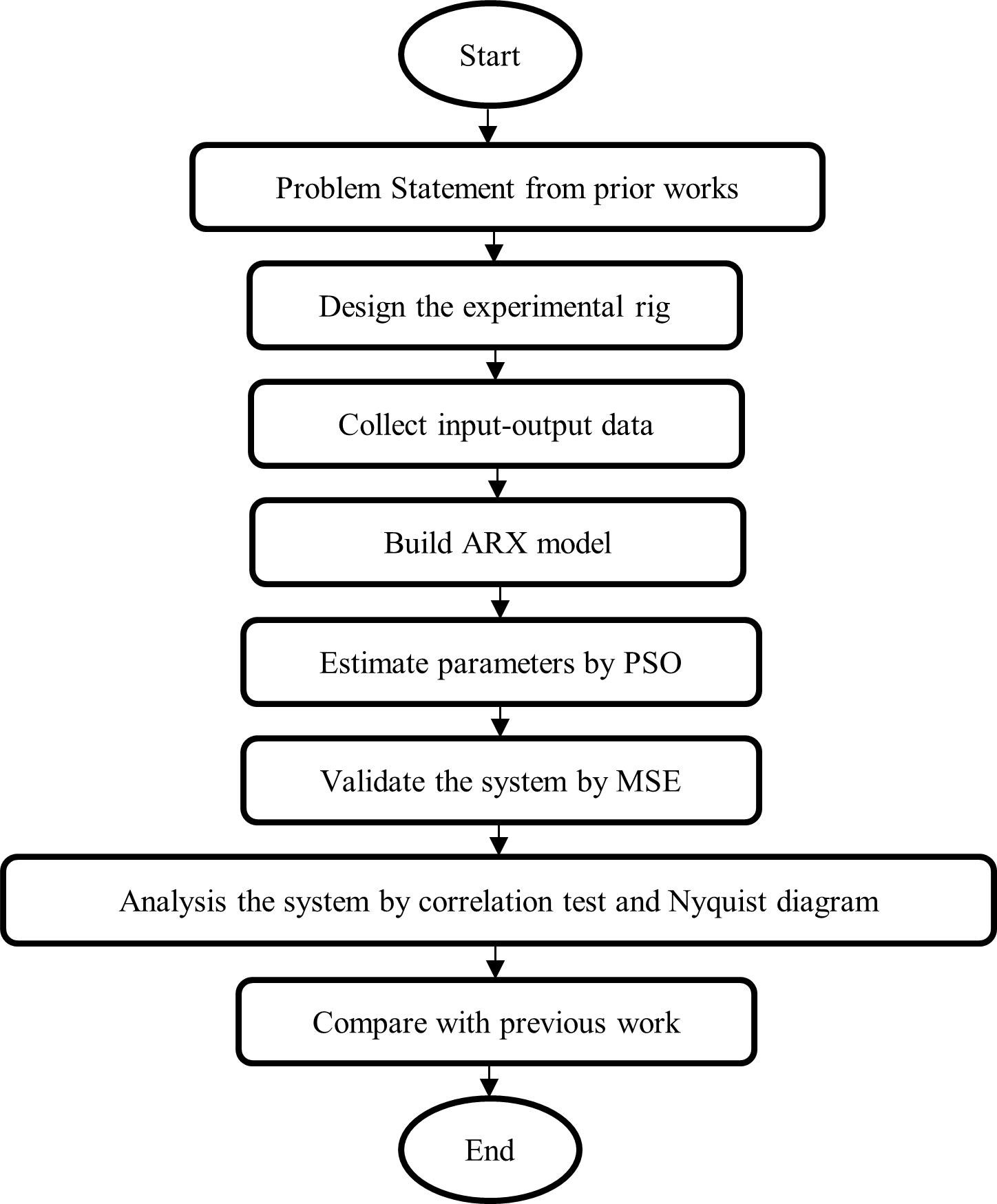
Figure 2. Current work methodology
- SYSTEM IDENTIFICATION MODEL (SIM)
System Identification Model (SIM) is the process of generating a mathematical model for the system in real-time process (inputs and outputs data) without the need to directly know the internal equations of the system. Because some systems (such as cars, ovens, or even the human body) may be too complex or impossible to model using only physical equations, it uses real data to build a model that approximates the system's behavior [26]. SIM consists of four steps which are input- output data collection from experimental work, selecting of model structure, model estimation and model validation. In this work after designing the experimental rig, Auto-Regressive Exogenous input (ARX) model has chosen because it takes into account the past values of the outputs and inputs, when noise is not a significant influence, and when the primary goal is to capture the dynamics of the system between the input and output, it is commonly used in data analysis and controller design [27][28]. The general form of the ARX model is shown in Equation (1) [25].
| 
| (1) |
 are referring to the is input, output and regarding of two polynomials at
are referring to the is input, output and regarding of two polynomials at  respectively, while v(k) is random impulse noise [28]. For second steps of SIM, PSO was used to estimate the parameters (
respectively, while v(k) is random impulse noise [28]. For second steps of SIM, PSO was used to estimate the parameters ( ) to predict the system behavior. PSO uses a swarm of random particles to "fly" in a d-dimensional search space for optimization problems. At each cycle, the two "best" values are updated for each particle. The first is called
) to predict the system behavior. PSO uses a swarm of random particles to "fly" in a d-dimensional search space for optimization problems. At each cycle, the two "best" values are updated for each particle. The first is called  (
( ), which is the best location a particle has been to so far. Second, the best position attained so far by any particle in the swarm is referred to as the global best or
), which is the best location a particle has been to so far. Second, the best position attained so far by any particle in the swarm is referred to as the global best or  (
( ). Both optimal places are remembered, and the particle is subsequently accelerated to those two best values by updating the particle position and velocity using the following set of equations [29]:
). Both optimal places are remembered, and the particle is subsequently accelerated to those two best values by updating the particle position and velocity using the following set of equations [29]:
| 
| (2) |
| 
| (3) |
The current velocity and position vectors for the  particle at time
particle at time  are
are  () and
() and  (), respectively. According to the literature [26], the acceleration coefficients are typically
(), respectively. According to the literature [26], the acceleration coefficients are typically  , with random integer between 0 and 1. The inertia (
, with random integer between 0 and 1. The inertia ( ) prevents the particle from abruptly changing direction by remembering its prior path [28]. The combination of global and local searches is optimal, with a linear decrease in with time, as indicated by [29]:
) prevents the particle from abruptly changing direction by remembering its prior path [28]. The combination of global and local searches is optimal, with a linear decrease in with time, as indicated by [29]:
| 
| (4) |
 is the maximum amount of time steps the swarm may search in. The inertia weight starts and ends at
is the maximum amount of time steps the swarm may search in. The inertia weight starts and ends at  and
and  , which decreases linearly from 0.9 to 0.25. Finally, model validation is the last step of SIM uses to verify the predicted data by comparing with the actual data. Mean square error (MSE) used in this work as a validation method and can be represented by [29]:
, which decreases linearly from 0.9 to 0.25. Finally, model validation is the last step of SIM uses to verify the predicted data by comparing with the actual data. Mean square error (MSE) used in this work as a validation method and can be represented by [29]:
| 
| (5) |
The symbol  represents the number of samples. Equation (5) minimizes the objective function and optimizes the parameters in Equation (1).
represents the number of samples. Equation (5) minimizes the objective function and optimizes the parameters in Equation (1).
- EXPERIMENTAL RIG AND INTEGRATED DEVICES
The PZA system was developed to mimic the dynamic behavior system by collecting input and output data. A sinusoidal voltage of 0 to 35 V was applied to the piezoelectric actuator at a single frequency of 1.2 Hz for a predetermined duration, and mechanical displacement was measured. The readings have been validated by calibrating all sensors. The PZA model QDA40-20-0.7, which has a length of 40 mm, a width of 20 mm, and a thickness of 0.7 mm, is the first of five components that comprise the system. The boost DC-DC power converter module XL 6009 amplifies the voltage to 35 V. The second component was the plexiglass holder that was used to secure the PZA. The holder is composed of three layers and has a length of 150 mm, a width of 100 mm, and a thickness of 10 mm. The initial layer served as the foundation for the structure, while the subsequent two layers were utilized for PZA fixation. These layers were connected by four fasteners, as illustrated in Figure 3 and Figure 4. The third component was the NI USB-6009 USB data acquisition system (DAQ), which featured 8 analog input ports, 2 analog output ports, 4 digital input ports, and 8 digital output ports. The signal was a sinusoidal wave with a voltage range of 0 to 35 V, a sampling rate of 0.005, and a frequency of 1.2 Hz. The accelerometer sensor model ADXL335 was utilized in the fourth section to acquire acceleration data from the PZA. The final component was the computer, which was equipped with MATLAB 2024b to transmit the signal to the PZA and capture the displacements using an accelerometer in a real-time system, as illustrated in Figure 5.
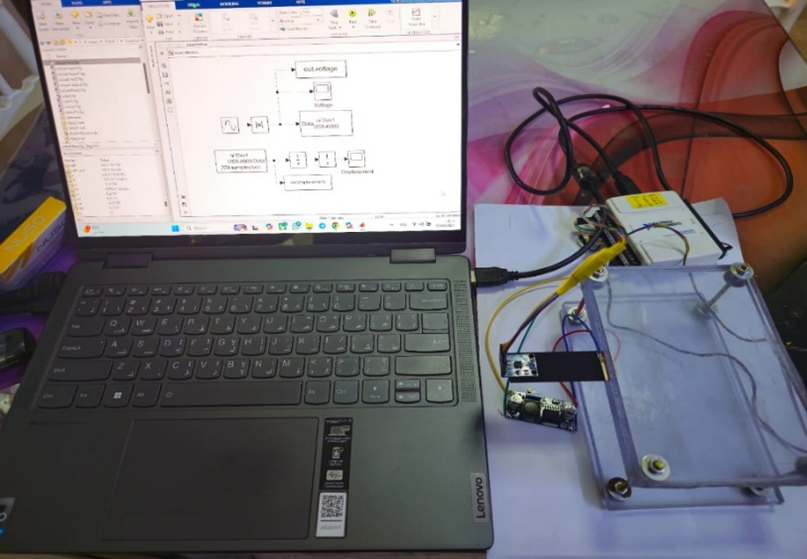
Figure 3. PZA experimental rig
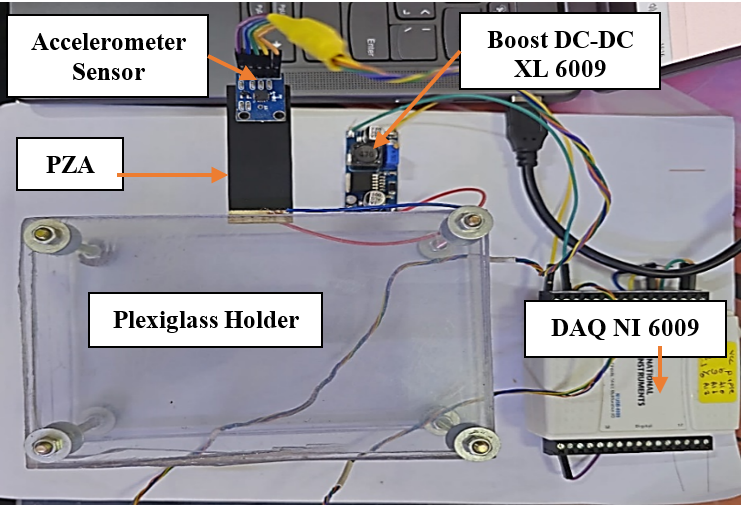
Figure 4. PZA system components
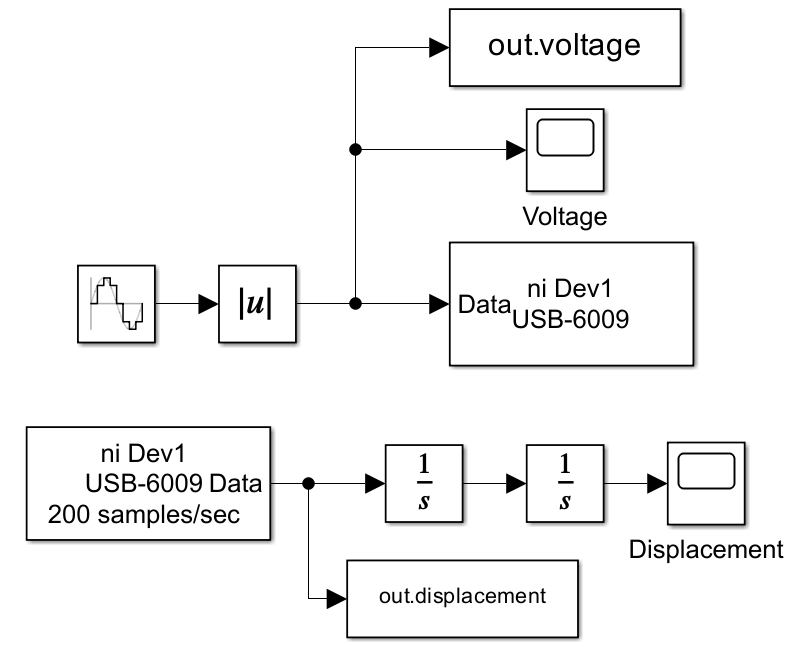
Figure 5. Real time system MATLAB Simulink
- RESULT AND DISCUSSIONS
This study collected input data as voltage and output data as a displacement by double integration in order to simulate the electromechanical PZA system using the ARX-PSO model. A real-time system for managing the work has been implemented in the MATLAB program 2024b, with a PSO population size of 50 and the number of iterations of 20. Figure 6 and Figure 7 illustrate the output of 2000 data collected over a 10 second period with sampling rate of 0.005. In order to model the system, some modifications were made to overcome some of the problems that may occur in collecting accounts such as noise and signal limitation by DAQ, improve the performance of algorithms, and improve the accuracy of distance-sensitive models. Figure 8 and Figure 9 show the input and output data after normalizing.
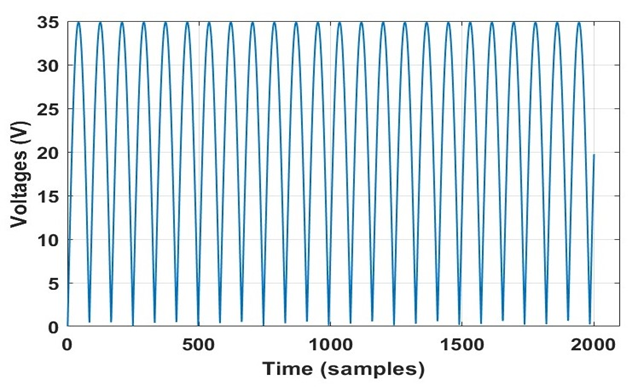
Figure 6. Voltage supplied to PZA
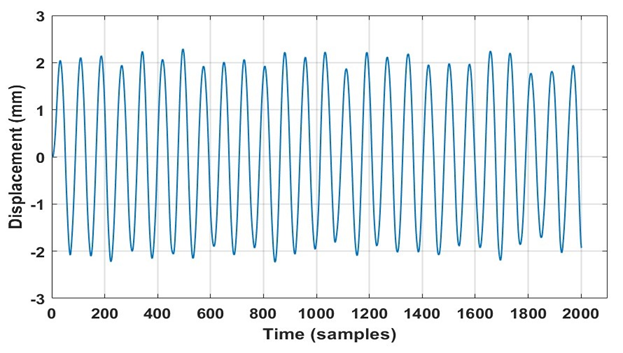
Figure 7. Displacement data for PZA
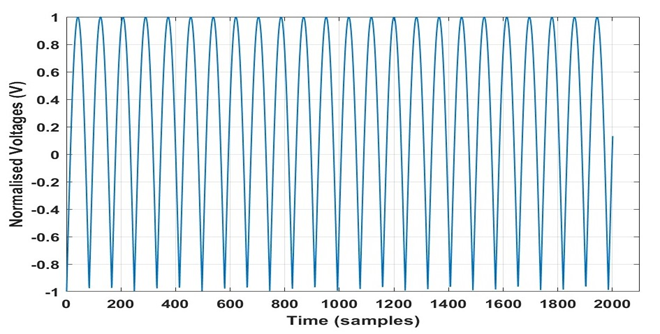
Figure 8. Normalized voltages for PZA
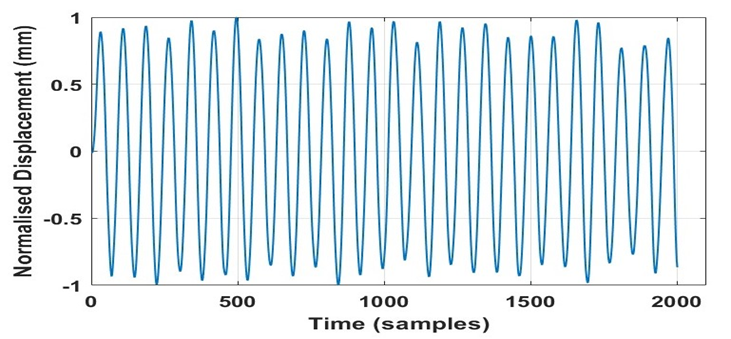
Figure 9. Normalized displacement for PZA
After creating the ARX model, PSO used to optimize the ARX model to find the best solution and generate the final transfer function. Input and output data are normalized to improve the data collection by setting the model order to 4 after many attempts as shown in Table 1. The swarm element number is set to 50 and the values of  and
and  are set to 2 based on the previous paper [26] in addition to setting the maximum iteration up to 20. 1000 data have been used for training and the other 1000 data used for prediction system performance. All efforts were verified using the MSE approach to assess optimal system performance and produce the final transfer function. Figure 10 demonstrates that the PSO approach effectively predicted the system behavior at model order 4, achieving the lowest MSE up to
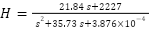
are set to 2 based on the previous paper [26] in addition to setting the maximum iteration up to 20. 1000 data have been used for training and the other 1000 data used for prediction system performance. All efforts were verified using the MSE approach to assess optimal system performance and produce the final transfer function. Figure 10 demonstrates that the PSO approach effectively predicted the system behavior at model order 4, achieving the lowest MSE up to  , while Figure 11 shows the error between the actual and predicted data. Equation (6) and equation (7) show the final transfer function that derived from data in continuous (
, while Figure 11 shows the error between the actual and predicted data. Equation (6) and equation (7) show the final transfer function that derived from data in continuous ( ) and discrete times (
) and discrete times ( ) at model order 4. This is because the structural properties of the ARX model are compatible with the transition function, in addition to the PSO's ability to handle non-convex error functions and its ability to explore the entire space.
) at model order 4. This is because the structural properties of the ARX model are compatible with the transition function, in addition to the PSO's ability to handle non-convex error functions and its ability to explore the entire space.
Table 1. mode order testing
| 
| (6) |
| 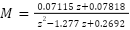
| (7) |
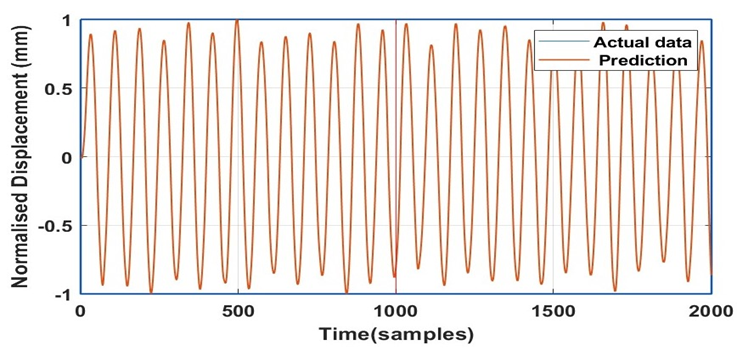
Figure 10. normalized displacement data before and after prediction
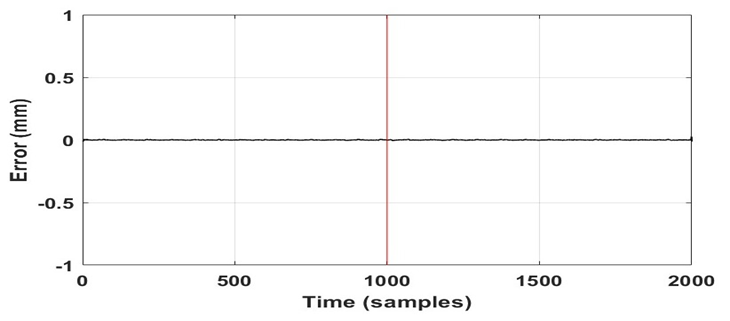
Figure 11. Difference error before Actual and predicted data
This result has compared to paper [27] that used RLS-ARX Model for 5000 data at 10 seconds (0.002 sampling rate) and reached to the lowest MSE of  , while current work used ARX-PSO presented the lowest MSE of
, while current work used ARX-PSO presented the lowest MSE of  . An MSE of around
. An MSE of around  shows that the proposed model well represents the main electromechanical dynamics, making it useful for both control and energy-harvesting purposes. A correlation test was implemented to see the relationship between input and error for predicted data and check the system if it will be used later in control process as shown in Figure 12. This is required in some model validation tests, where the goal is for errors to be independent of the inputs (whiteness + independence).
shows that the proposed model well represents the main electromechanical dynamics, making it useful for both control and energy-harvesting purposes. A correlation test was implemented to see the relationship between input and error for predicted data and check the system if it will be used later in control process as shown in Figure 12. This is required in some model validation tests, where the goal is for errors to be independent of the inputs (whiteness + independence).
The signal was within confident limit at 95 % and proved that the error does not depend on the square of the signal or in other words there is no strong nonlinearity or noise problem in the modeling control process therefore, the estimated model adequately describes the system. Finally, the stability of the closed system is verified using the Nyquist stability criterion and dealing with systems with time delays or zeros/poles in the right half-plane. Thus, the overall stability at the complex level is verified using the frequency response as shown in Figure 13.
The path does not surround the point (-1,0), which indicates that the closed system is stable. In addition, there is no approach or twist around the critical point, which indicates that stability is present. Finally, the size of the path and its proximity to the point (-1,0) gives an idea about the gain and phase. The actuator's damping and resonance frequency match piezoelectric dynamics. Electromechanical coupling and electrical loads cause zeros. Overall, the pole–zero structure represents a realistic and physically relevant piezoelectric actuator paradigm.
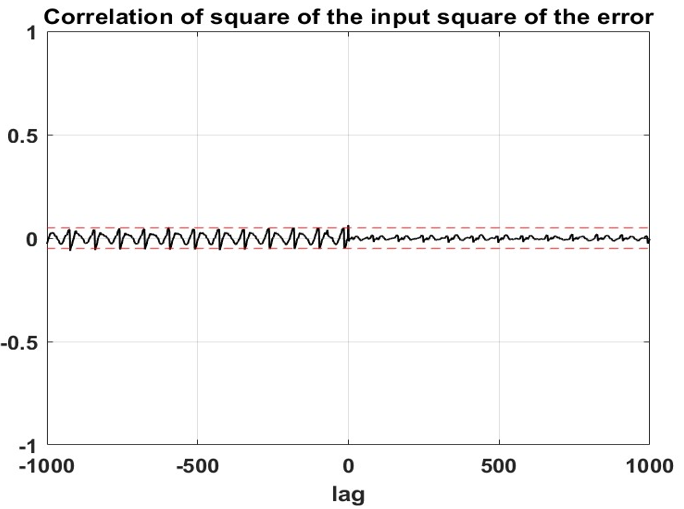
Figure 12. Correlation test for PZA
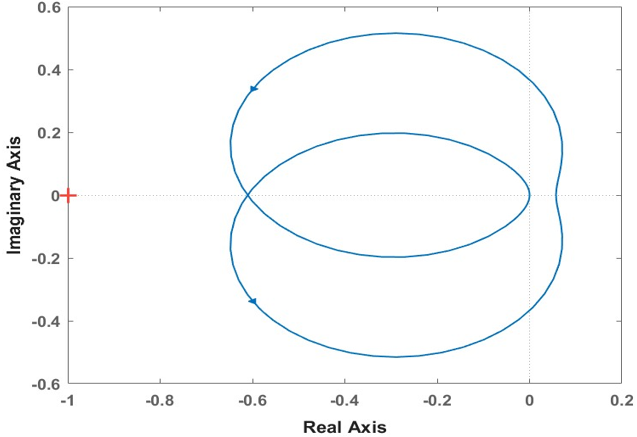
Figure 13. Nyquist diagram for PZA
- CONCLUSIONS
This research successfully modeled a piezoelectric actuator using the particle swarm optimization (PSO) method as a main contribution. The ARX-PSO model mimicked the dynamic behavior of PZT with the lowest MSE at input voltage ranged between 0 to 35 V and compared with the previous work [24]. Despite the challenges posed by their nonlinear dynamics, a piezoelectric actuator was successfully modeled. A 35 V was applied to the PZA after amplifying it by a DC-DC booster. An accelerometer was used to measure the displacement that resulted from applying a sinusoidal voltage ranging from 0 to 35 V to the actuator. The acceleration signal was then processed using double integration to get the displacement data practically. The dynamic behavior of the actuator was then represented by a transfer function that was derived using the PSO technique in MATLAB. With a minimal mean square error (MSE) of , the findings demonstrated that the PSO approach achieved great modeling accuracy in both the time and frequency domains. A correlation test revealed a good match between the measured output and the model output, and the Nyquist plot validated the model's correctness and stability. These findings show how well the PSO approach generates precise models of dynamic systems, which makes it a useful tool for control system design and piezoelectric actuator analysis. In the future, the accurate model developed here can be used as a foundation for designing model-based vibration controllers or for optimizing input waveforms to maximize energy harvesting efficiency.
REFERENCES
- P. M. Ferreira, et al., "Embedded Sensors for Structural Health Monitoring: Methodologies and Applications Review," Sensors, vol. 22, no. 21, p. 8320, 2022, https://doi.org/10.3390/s22218320.
- L. He, X. Yue, et al., "Research on variable stiffness asymmetrical resonant linear piezoelectric actuator based on multi-modal drive," Smart Materials and Structures, vol. 33, no. 1, pp. 015032–015032, 2023, https://doi.org/10.1088/1361-665x/ad1426.
- J. Guan, J. Deng, et al., "A spatial 3-DOF piezoelectric robot and its speed-up trajectory based on improved stick-slip principle," Sensors and Actuators A Physical, vol. 374, pp. 115502–115502, 2024, https://doi.org/10.1016/j.sna.2024.115502.
- H. Xue, et al., "Flexible, biodegradable ultrasonic wireless electrotherapy device based on highly self-aligned piezoelectric biofilms,” Science Advances, vol. 10, no. 22, 2024, https://doi.org/10.1126/sciadv.adn0260.
- Z. Yuan, et al., "Piezo-actuated smart mechatronic systems: Nonlinear modeling, identification, and control," Mechanical Systems and Signal Processing, vol. 221, p. 111715, 2024, https://doi.org/10.1016/j.ymssp.2024.111715.
- C. Li, C. You, et al., "Parameter Identification of the RBF-ARX Model Based on the Hybrid Whale Optimization Algorithm," IEEE Transactions on Circuits & Systems II Express Briefs, vol. 71, no. 5, pp. 2774–2778, 2024, https://doi.org/10.1109/tcsii.2024.3351848.
- S. B. Lang and S. Muensit, "Review of some lesser-known applications of piezoelectric and pyroelectric polymers," Applied Physics A, vol. 85, no. 2, pp. 125–134, 2006, https://doi.org/10.1007/s00339-006-3688-8.
- X. Gao, et al., "Piezoelectric Actuators and Motors: Materials, Designs, and Applications," Advanced Materials Technologies, vol. 5, no. 1, p. 1900716, 2019, https://doi.org/10.1002/admt.201900716.
- M. Kanchan, et al., "Application of Modeling and Control Approaches of Piezoelectric Actuators: A Review," Technologies (Basel), vol. 11, no. 6, pp. 155–155, 2023, https://doi.org/10.3390/technologies11060155.
- M. Febbo, et al., "Modelling of a Piezoelectric Beam with a Full-Bridge Rectifier Under Arbitrary Excitation: Experimental Validation," SSRN Electronic Journal, vol. 10, no. 2, pp. 311-324. 2022, https://doi.org/10.2139/ssrn.4176712.
- J. Gan and X. Zhang, "A review of nonlinear hysteresis modeling and control of piezoelectric actuators," AIP Advances, vol. 9, no. 4, pp. 040702–040702, 2019, https://doi.org/10.1063/1.5093000.
- X. Zhou, et al., “Review on piezoelectric actuators: materials, classifications, applications, and recent trends," Frontiers of Mechanical Engineering, vol. 19, no. 1, 2024, https://doi.org/10.1007/s11465-023-0772-0.
- R. T. Momin, "Piezoelectric Sensors for Real-time Monitoring and Quality Control in Additive Manufacturing," arXiv preprint arXiv:2310.14321, 2023, https://doi.org/10.48550/arxiv.2310.14321.
- S. Wang, et al., "A survey of piezoelectric actuators with long working stroke in recent years: Classifications, principles, connections and distinctions," Mechanical Systems and Signal Processing, vol. 123, pp. 591–605, 2019, https://doi.org/10.1016/j.ymssp.2019.01.033.
- Z. P. Zhang, et al., "Piezoelectric friction–inertia actuator—a critical review and future perspective," The International Journal of Advanced Manufacturing Technology, vol. 62, no. 5–8, pp. 669–685, 2012, https://doi.org/10.1007/s00170-011-3827-z.
- K. Spanner and B. Koc, "Piezoelectric Motors, an Overview," Actuators, vol. 5, no. 1, p. 6, 2016, https://doi.org/10.3390/act5010006.
- M. Hunstig, "Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives, " Actuators, vol. 6, no. 1, p. 7, 2017, https://doi.org/10.3390/act6010007.
- F. Chen, Q. Zhang, Y. Gao, and W. Dong,"A Review on the Flexure-Based Displacement Amplification Mechanisms," IEEE Access, vol. 8, pp. 205919–205937, 2020, https://doi.org/10.1109/access.2020.3037827.
- X. Tian, et al., "A review on piezoelectric ultrasonic motors for the past decade: Classification, operating principle, performance, and future work perspectives," Sensors and Actuators A-physical, vol. 306, p. 111971, 2020, https://doi.org/10.1016/J.SNA.2020.111971.
- G. Papazoglou and P. Biskas, “Review and Comparison of Genetic Algorithm and Particle Swarm Optimization in the Optimal Power Flow Problem,” Energies, vol. 16, no. 3, p. 1152, 2023, https://doi.org/10.3390/en16031152.
- Saad-Eddine Chafi, Younes Balboul, M. Fattah, S. Mazer, and Moulhime El Bekkali, “Enhancing Resource Allocation in Edge and Fog-Cloud Computing with Genetic Algorithm and Particle Swarm Optimization,” Intelligent and converged networks, vol. 4, no. 4, pp. 273–279, 2023, https://doi.org/10.23919/icn.2023.0022.
- H. Kamel and A. A. El-Kashef, "Comparative Analysis of Particle Swarm Optimization (PSO) and Genetic Algorithms (GA) for Optimal Radar Coverage Area Maximization," 2025 15th International Conference on Electrical Engineering (ICEENG), pp. 1-6, 2025, https://doi.org/10.1109/iceeng64546.2025.11031334.
- H. Li, Y. Tong, and C. Li, "Modeling and Control of a Linear Piezoelectric Actuator," Actuators, vol. 13, no. 2, pp. 55–55, 2024, https://doi.org/10.3390/act13020055.
- J. Shields and E. Konefat. Modeling of Piezoceramic. Piezoelectric Actuators: Principles, Design, Experiments and Applications. 2021, https://doi.org/10.5772/intechopen.96727.
- P. Ge and Musa Jouaneh, "Modeling hysteresis in piezoceramic actuators," Precision Engineering, vol. 17, no. 3, pp. 211–221, 1995, https://doi.org/10.1016/0141-6359(95)00002-u.
- H. M. S. Georgiou and R. B. Mrad, "Electromechanical Modeling of Piezoceramic Actuators for Dynamic Loading Applications," Journal of Dynamic Systems, Measurement, and Control, vol. 128, no. 3, pp. 558–567, 2005, https://doi.org/10.1115/1.2234486.
- M. N. Maslan, M. Mailah, and I. Z. M. Darus, "Identification and Control of a Piezoelectric Bender Actuator, " 2012 Third International Conference on Intelligent Systems Modelling and Simulation, pp. 461–466, 2012, https://doi.org/10.1109/isms.2012.100.
- S. Jing, "Identification of the ARX Model with Random Impulse Noise Based on Forgetting Factor Multi-error Information Entropy," Circuits Systems and Signal Processing, vol. 41, no. 2, pp. 915–932, 2021, https://doi.org/10.1007/s00034-021-01809-3.
- H. M. Yatim, et al., "Two-phase heat transfer microchannel system identification with Particle Swarm Optimization (PSO) approach," International Journal of Air-Conditioning and Refrigeration, vol. 31, no. 1, 2023, https://doi.org/10.1007/s44189-023-00029-5.
AUTHOR BIOGRAPHY

| Mohammed Jawad Mohammed, received Ph.D. degree in electromechanical engineering from University of Technology, Malysia, in 2016. Now he works at ministry of High education, University of technology, Baghdad, Iraq. His current research interests include electromechanical Devices and instrumentation, traditional and intelligent modeling and optimization techniques. Email: mohammed.j.mohammed@uotechnology.edu.iq Orcid: https://orcid.org/0000-0002-8465-7880 |
|
|

| Akeel Abtan, received the B.Sc and M.Sc degrees from the Mechanical Engineering Department, University of Baghdad, Baghdad, Iraq, in 1998 and 2003 respectively. The Ph.D. degree from the University of Leeds, Leeds, United Kingdom, 2019. Dr. Akeel is currently occupying many positions such as a rapporteur of energy branch, and member of the committee for undergraduate studies examinations since 2019. Also, Akeel is a member of the syndicate of Iraqi engineers since 1998, ASME (The American Society of Mechanical Engineers) since 2015, and IEEE (The Institute of Electrical and Electronics Engineers) since 2016. His research interests are in Mechanical Design of Robot, Origami Robots, Fracture Mechanics, CNC Machine and 3D Printers, Mechatronics and Robotic Systems, Dynamic Analysis of Structures, and Artificial Intellects and Automation Systems. Email: akeel.a.abtan@uotechnology.edu.iq Orcid: https://orcid.org/0000-0002-2271-8617 |
|
|

| Raheel Jawad, received the B.Sc and M.Sc degrees from the Mechanical Engineering Department, University of Baghdad, Baghdad, Iraq, in 1998 and 2003 respectively. The Ph.D. degree from the University of Leeds, Leeds, United Kingdom, 2019. Dr. Akeel is currently occupying many positions such as a rapporteur of energy branch, and member of the committee for undergraduate studies. Email: raheel.j.abdulkadhim@uotechnology.edu.iq Orcid: https://orcid.org/0000-0002-0516-603X |
Mohammed Jawad Mohammed (Intelligent Modelling of Electromechanical Piezoelectric Actuator)